所屬科目:【阿摩】未分類題庫
1. iRobot家用吸塵機器人平均25坪大小需要花一小時清理,所需功率為33Wh,今天有一個40坪大小的樓層需要完整清潔,試問要選以下何種規格的電池可以確保完成清潔作業? (A)14.4V/3500mAH (B)14.4V/3000mAH (C)14.8V/4400mAH (D)22.2V/1500mAH。
2. 定位精度為機器人控制系統能夠分辨出差異的最小工作空間位置控制增量變化。機器人的定位精度與下列何者沒有直接的關係? (A)伺服控制器 (B)機械構造及材料特性 (C)位置感測器 (D)機器人程式語言。
3. 機器人系統之時間週期為往返工作空間特定垂直高度與特定水平距離的時間。下列何種機器人有最短的時間週期? (A)直角座標 (B)圓柱座標 (C)並聯式 (D)關節型 機器人。
4. 市售工業用機器人一般基本配置包含 (A)機械臂 (B)機械臂/控制器/夾爪 (C)機械臂/控制器/操作電腦 (D)機械臂/控制器/教導器。
5. 機器人一般在定位的表現上採用 (A)重複精度(Repeatability) (B)準確度(Accuracy)(C)精確度(Precision) (D)無特定的用詞。
6. 機器人與攝影機整合運作,下列哪一項正確? (A)攝影機可安裝於機器人終端效應器上(B)攝影機可安裝於機器人外部 (C)攝影機可安裝於機器人手臂上 (D)以上皆是。
7. 多軸關節型機械臂能重複到達某特定姿態的能力稱為 (A)精確度 (B)重現性 (C)適應性(D)以上皆非。
8. 一般增量式旋轉編碼器有兩個相差90度之兩輸出訊號(A相與B相),若輸出相為方波訊號且每轉脈波數為100pulse/rev,則經由解碼器後可得到之最佳解析度為何? (A) 0.9° (B)1.8° (C)3.6° (D)7.2°。
9. 一台直流電動機之電磁功率為1200瓦以及轉速為5000rpm運轉,則產生的轉矩為何? (A)2.29 (B)3.31 (C)5.72 (D)10.2 牛頓-米。
10. 機器人起動後的運轉試驗不包括哪一項? (A)各軸如預定地移動並受限制 (B)教導器回放(Playback)功能正常運作 (C)緊急停止功能可發揮功能 (D)應用適當的安全防護方式。
11.若機器人的關節使用伺服馬達進行驅動,若輸入的馬達驅動器的訊號為脈波指令,則此時應該是設定哪一種馬達控制模式? (A)速度控制 (B)轉矩控制 (C)位置控制 (D)以上皆非。
12.有一每步運轉10度之步進馬達,其驅動速率為200步/秒,其輸出扭力為0.12N-m,最後透過一組齒輪比為1:4之齒輪帶動輸出軸,則此軸輸出功率為? (A)16.74W (B)16.74hp (C)4.19W (D)4.19hp。
13.提供220V/50Hz電源來驅動4極感應馬達,馬達的理論轉速為多少rpm? (A)1800 (B)1700 (C)1600 (D)1500。
14.下列敘述何者不正確? (A)DC馬達有速度調整(speed regulation)的特性。加上負荷時仍能維持它的轉速 (B)並激馬達(shunt-wound motor)上,磁場通量不受電流變化而形成的反電動勢影響,因此馬達具有較自然的速度調整(speed regulation) (C)永磁馬達(PM馬達)的磁通量為一個與轉速無關的常數,因此扭矩速度的曲線相當線性 (D)DC馬達轉矩和速度不可以用脈波寬度調幅(pulse-width modulation,PWM)方式控制。
15.在外殼標示200 STEP的步進馬達,它的一個步進角是_______度。 (A)1 (B)1.8 (C)2 (D)20
16.設計伺服控制系統需考慮之因素,下列何者為非? (A)選用馬達 (B)選用角位置感測計 (C)選用陀螺儀 (D)設計控制器。
17.對於一個8位元ADC,該ADC的參考電壓為7伏特,在類比輸入處為2.5伏特,請問該ADC的二進位輸出為何? (A)01011011 (B)01011010 (C)01011001 (D)01011111。
18.起動機器人前,應先確認下列何種事項? (A)機器人工作範圍內無任何人存在 (B)教導器、工具等均已置於規定位置 (C)機器人或關連機器之異常指示燈等均未顯示有異常 (D)以上皆是。
19.以下敘述何者有誤? (A)齒輪傳動系統可依運轉需要做加速或減速 (B)蝸桿蝸輪傳動系統可以傳遞較高的動力並具有高效率,但不得用於高減速比(C)齒輪傳動系統的優點之一是可以傳遞較高的動力 (D)齒輪傳動系統運轉圓滑,所以震動小。
20.以下敘述何者有誤? (A)皮帶傳動系統中,V型皮帶具有最高的動力傳送能力 (B)平皮帶驅動系統成本低廉,但容易打滑造成傳動不確實 (C)內循環式滾珠螺桿比外循環式滾珠螺桿的剛性高,並且可以承受較大的軸向負荷 (D)皮帶傳動系統除了傳動平滑外,亦有助於吸收震動。
21.在複式輪系中,若有偶數個中間輪,則首輪與末輪之轉向 (A)相反 (B)相同 (C)不一定 (D)無關。
22.A、B兩個外接齒輪,其軸心相距30cm,A齒輪有40齒,模數為12,A輪傳動B輪,使B輪產生300rpm迴轉之轉速,則A輪之迴轉速為_______ rpm。(A)50 (B)75 (C)100 (D)125
23.一鏈條傳動機構兩輪齒數分別為10、30,軸中心距500mm,鏈條節距為10mm,試算所需鏈條節數約為? (A)100 (B)120 (C)150 (D)160。
24.致動器(actuator)可以使機器人、機械等運動;將電力、空氣壓力、油壓等能量來源轉換為機械的旋轉運動、往復運動、搖擺運動等的零件。請問下列哪一個致動器會造成搖擺運動? (A)步進馬達 (B)氣壓缸 (C)搖擺式致動器 (D)形狀記憶合金。
25. 在機器人的組成機構中,有各式各樣的傳動裝置,請問下列機構對應的名稱哪個是正確的? (A)圓柱凸輪機構 (B)剛性聯軸器 (C)曲柄滑塊機構 (D)棘輪機構。
26.行星齒輪系統(planetary gear train)為常用的減速系統之一,具有太陽齒輪(sun gear)、行星齒輪(planet gear)、齒圈(annulus gear)、和行星架(carrier)等元件。當固定端、輸入端、和輸出端為下列何種排列時,可達到減速效果? (A)太陽齒輪、行星架、齒圈 (B)齒圈、行星架、太陽齒輪 (C)行星架、齒圈、太陽齒輪 (D)太陽齒輪、齒圈、行星架。
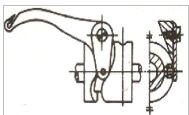
27.如圖之機器人夾爪,屬於四連桿機構中的哪一類?
(A)變構點機構 (B)曲柄搖桿機構 (C)雙搖桿機構 (D)參搖桿機構。
28.在機器人夾爪上會使用齒輪來改變傳動及方向,一般而言齒輪與齒輪間的距離為下列何者總合的一半? (A)齒頂圓直徑 (B)節圓直徑 (C)齒根圓直徑 (D)齒頂高。
29.如圖為某公司的兩指電動夾具示意圖與夾持力公式,若滿足夾取物不掉落之條件為2μF>W,其中夾具與工作物間的摩擦係數μ=0.2 以及工作物重量W=10kg,假設安全係數Sc為4,試問應當選擇多少夾持力之夾爪? _______N。(A)6.25 (B)61.25 (C)100 (D)980
30.下述有關夾爪的敘述,何者有誤? (A)電磁式夾爪比永磁式夾爪容易控制 (B)夾持工作結束時,永磁式夾爪比電磁式夾爪更容易釋放物件 (C)真空吸盤式夾爪具有吸收震動的能力 (D)真空吸盤式夾爪經常被用於抓取非金屬物件。
31.夾爪之夾片上加裝壓電式感測器,無法直接或間接測量夾爪之下列何種物理狀態? (A)挾持力 (B)挾持壓力 (C)加速度 (D)夾爪大小。
32.機器人末端作用器(End-effector)是指? (A)機器手臂的最後一個連桿 (B)機器手臂末端點位置 (C)機器手臂末端點上的設備 (D)機器手臂的控制器。
33.如圖為最有可能是哪一種機構類型的夾爪?
(A)支點型 (B)平行型 (C)同心型 (D)以上皆非。
34.機器人遇緊急停止或停止運轉時,其握持部應執行以下何動作? (A)中斷握持放下持有物 (B)繼續穩定握持其所握持之物件 (C)視狀況而定若持有為重物則放下,減少機構損傷(D)以上皆非。
35.當工業機器人運轉狀態從自動模式轉換為教導模式時其安全防護機能需? (A)自動降低其運動速度 (B)維持其相同運動速度 (C)可增加其運動速度 (D)維持其正常運動出力狀態。
36.機器人應可以使用哪些方式限制機器人的運動範圍? (A)機械式 (B)電子式 (C)軟體程式 (D)以上皆可。
37.下列為機器人安全設計原則之風險評估四大程序(順序未知):
①判定危險因子;②評定風險;③估計風險;④決定機器人的使用相關限制事項。請問下列排序何者正確? (A)①②③④ (B)④①②③ (C)④①③② (D)④③②①。
38.下列何者為機器人安全額定中減速控制的主要用途? (A)使機器人不因高轉速導致馬達毀損 (B)使機器人之控制更為準確 (C)提供人員充分時間遠離危害運動或停止該機器人 (D)以上皆是。
39.對於工業機器人緊急停止功能,下列敘述何者有誤? (A)優先順序高於其他機器人控制方式 (B)必須保留機器人致動器之驅動動力 (C)致使所有受控制之危害停止 (D)維持作用直至重置為止。
40.下列何者非工業機器人可能造成的機械危害? (A)端效器工具之旋轉 (B)端效器失效(C)機器人零件之移動 (D)碰觸帶電零件或接線。
41.下列何者非爲安全檢知系統? (A)移載檢知 (B)感應光閘 (C)自動光學檢查機台(AOI) (D)智慧門扣。
42.當人員進入在安全圍籬內,何者爲優先采取的措施? (A)停止手臂運行(B)告知人員如何閃過手臂動作 (C)找人陪同進入 (D)限制進入的時間。
43.在機器人學中,什麼是「SLAM」?(A)SLAM是機器人的一種感知技術 (B)SLAM是機器人的運動控制算法 (C)SLAM是一種自主定位和地圖構建技術 (D)SLAM是機器人的人機互動界面。
44.圖中是哪一種機構?
(A)RRR (B)RPR (C)PRP (D)PPP。
45.造成6軸垂直多關節型機械手臂,程式的直線動作從靜止時起動的瞬間,或者從直線動作靜止的瞬間,末端效應器或TCP有輕微震動現象的原因,下列何者最合理?(A)程式點位教導不準確 (B)負載(payload)設定與實際物件有差異或沒有設定,使6個馬達加速度難以協調 (C)風力等外部因素造成 (D)機器上沒有放乖乖。
46.已經編寫完成的機械手臂程式,點位都教導好了,也測試過沒問題,在生產線上持續動作了幾個月,沒有發生過撞機或重大異常。突然發生位置偏差,放置工件到治具X時一直撞到同一個角,但另一個治具Y的取出位置沒問題。最有可能造成此問題的原因是: (A)機器手臂(包含底座)的位置沒固定好,產生移動 (B)夾爪因為某種原因被撞歪了 (C)機器手臂的馬達故障 (D)治具X位置可能被移動過了。
47.關於定馬力之馬達,下列敘述何者正確? (A)其輸出的扭矩與轉速不相關 (B)其輸出轉速愈低則輸出扭矩愈小 (C)AC馬達必須供應直流電源 (D)三相交流感應馬達的轉速和頻率成正比。
48.若一個增量型旋轉編碼器(Encoder),其解析能力為200[pulse/rev],下列敘述何者錯誤?(A)每轉一圈可以產生200個脈波訊號 (B)旋轉20圈、共產生5000個脈波訊號 (C)最小解析度為1.8度 (D)若每一秒產生6000個脈波訊號,代表轉速為1800[rpm]。
49.在機械手臂操作中,什麼是「碰撞檢測」的主要目的? (A)減少機械手臂的速度 (B)防止手臂與物體碰撞 (C)增加手臂的載重能力 (D)提高手臂的精確度。
50.在機械手臂的運動規劃中,「反向運動學」的主要用途為何? (A)計算手臂的速度和加速度 (B)確定手臂的姿勢和位置 (C)最小化手臂的能量消耗 (D)調整手臂的運動軌跡以適應環境變化。
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (B)剛性聯軸器
(B)剛性聯軸器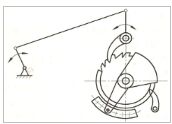 (C)曲柄滑塊機構
(C)曲柄滑塊機構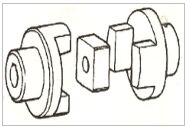 (D)棘輪機構
(D)棘輪機構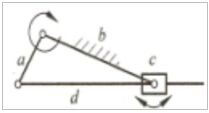 。
。 (A)變構點機構 (B)曲柄搖桿機構 (C)雙搖桿機構 (D)參搖桿機構。
(A)變構點機構 (B)曲柄搖桿機構 (C)雙搖桿機構 (D)參搖桿機構。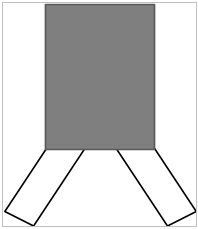 (A)支點型 (B)平行型 (C)同心型 (D)以上皆非。
(A)支點型 (B)平行型 (C)同心型 (D)以上皆非。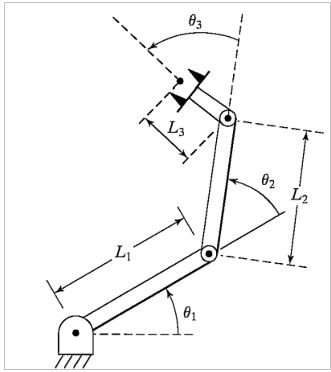 (A)RRR (B)RPR (C)PRP (D)PPP。
(A)RRR (B)RPR (C)PRP (D)PPP。