題組內容
Q4 In this problem, the control of an unstable, non-minimum-phase plant 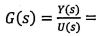
 is considered.
is considered.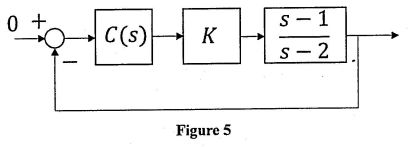
(d) Combine the results in (b) and (c) and derive a dynamic compensator for the system. What is the control transfer function 
 阿摩線上測驗
登入
阿摩線上測驗
登入
Q4 In this problem, the control of an unstable, non-minimum-phase plant is considered.
(d) Combine the results in (b) and (c) and derive a dynamic compensator for the system. What is the control transfer function