題組內容
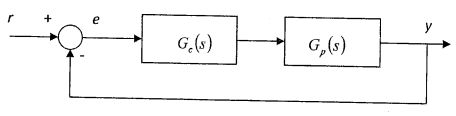
3. Consider the following feedback system with plant  and controller
and controller

(e) As in part (d), design the closed-loop poles at -1± j, design the controller 
 阿摩線上測驗
登入
阿摩線上測驗
登入
3. Consider the following feedback system with plant and controller
(e) As in part (d), design the closed-loop poles at -1± j, design the controller