阿摩線上測驗
登入
首頁
>
技師◆冷凍空調自動控制
>
99年 - 99 專技高考_冷凍空調工程技師:冷凍空調自動控制#37062
> 申論題
題組內容
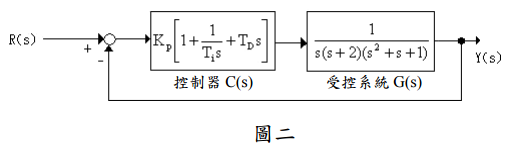
二、一 PID 控制系統如圖二所示, 控制器 C(s) 受控系統 G(s) 圖二 試求:
⑵應用羅斯-賀維茲(Routh-Hurwitz)準則,欲使系統穩定,K
p
值的範圍為何?又 終極增益(ultimate gain)為何?(10 分)
相關申論題
⑶由羅斯表中的輔助方程式,求系統的終極週期(ultimate period)Tu?(3 分)
#104304
⑷由Ziegler-Nichols經驗,Kp=0.6Ku,Ti=0.5Tu,TD=0.125Tu,決定Kp,Ti,TD值 為何?(3 分)
#104305
⑴何謂水路控制閥之流量係數 Cv?(5 分)
#104306
⑵如圖三所示,當盤管水量為 3L/S時,盤管水壓降Δ Pcoil=20 kPa,若系統水壓降 Δ Psystem=80 kPa,而閥之特性為線性(Linear),在閥全開時,盤管之要求 水量為 5L/S,則控制閥之選用規格為何?(8 分)
#104307
⑶該閥在 50%開度時,盤管水量為若干 L/S?(7 分)
#104308
四、⑴風量控制方式的方法有那些?(4 分)
#104309
⑵分別對於不同的風量控制方式,由阻力特性曲線說明當風量減少時,風機壓力曲 線、阻力曲線、操作點與靜壓如何變動?(21 分)
#104310
五、試就「安裝位置」、「構造」、「動作原理」與「回油」狀況,比較高壓、低壓浮 球控制閥的異同。(20 分)
#104311
⑴函數 MAXF 為找 ADATA 中的最大值,將此最大值存入 VALMAX 並列印出來。(7 分)
#104312
⑵函數 MINF 為找 ADATA 中的最小值,將此最小值存入 VALMIN 並列印出來。 (7 分)
#104313
相關試卷
114年 - 114 專技高考_冷凍空調工程技師:冷凍空調自動控制#133704
114年 · #133704
113年 - 113 專技高考_冷凍空調工程技師:冷凍空調自動控制#123924
113年 · #123924
112年 - 112 專技高考_冷凍空調工程技師:冷凍空調自動控制#117674
112年 · #117674
111年 - 111 專技高考_冷凍空調工程技師:冷凍空調自動控制#111910
111年 · #111910
110年 - 110 專技高考_冷凍空調工程技師:冷凍空調自動控制#104221
110年 · #104221
109年 - 109 專技高考_冷凍空調工程技師:冷凍空調自動控制#93133
109年 · #93133
108年 - 108 專技高考_冷凍空調工程技師:冷凍空調自動控制#80858
108年 · #80858
107年 - 107 專技高考_冷凍空調工程技師:冷凍空調自動控制#72907
107年 · #72907
106年 - 106 專技高考_冷凍空調工程技師:冷凍空調自動控制#66559
106年 · #66559
104年 - 104 專技高考_冷凍空調工程技師:冷凍空調自動控制#36193
104年 · #36193
 阿摩線上測驗
登入
阿摩線上測驗
登入