 阿摩線上測驗
阿摩線上測驗
題組內容
四、對於一閉迴路控制系統(closed loop control system),如下圖: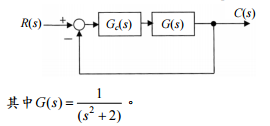
⑵試利用 PID(比例-積分-微分)設計一控制器 Gc (s ) 使系統之安定時間(settling time;實際響應於穩態輸出之間的誤差<2%)小於 1,且最大超越量百分比 (maximum overshoot percentage)小於 10%。(20 分)
詳解 (共 1 筆)

hchungw
詳解 #5953775

為了使系統的響應滿足給定的性能指標(例如安定時間小於1秒,最大超越量百分比小於10%),需要適當地選擇這些增益。以下是一個基本的設計策略:
-
比例增益 Kp:增加 Kp 會增加系統的響應速度,但也可能增加超越量。通常先選擇一個小的 Kp,然後慢慢增加它,直到響應速度和超越量在可接受的範圍內。
-
積分增益 Ki:積分動作可以消除穩態誤差,但增加 Ki 也可能引入更多的振蕩。選擇合適的 Ki 值,使得穩態誤差小,但不會導致太多的振蕩。
-
微分增益 Kd:微分動作可以抑制振蕩,提高系統的響應速度。增加 Kd 可以減少超越量和安定時間,但選擇太大的 Kd 值可能會引入高頻噪聲。
考慮到需要的性能指標(安定時間小於1秒,最大超越量百分比小於10%),可以使用以下策略:
- 由於需要快速的響應(安定時間小於1秒),可以選擇較大的 Kp 和 Kd。
- 要限制超越量小於10%,可能需要一個適中的 Kd 值來提供阻尼。
- 使用 Ki 來確保系統沒有穩態誤差。
具體的增益選擇需要根據受控系統的傳遞函數進行調整和優化。通常,可以使用試誤方法、根軌跡分析或頻率響應技術來選擇適當的增益。有時還可能需要使用更複雜的方法,如最優化技術,來得到最佳的增益組合。