所屬科目:高中技藝◆工業類◆機電整合
1. 針對同一口徑的方向閥利用提昇方式設計的方向控制閥( P o p p e t V a l v e ) 所需的作 動時間比利用滑柱方式設計者( S p o o l V a l v e ) 長。(A)O(B)X
2. 氣壓缸安裝型式C A 和C B 的差別在於其支撐腳座的安裝位置, C A 的腳座在活塞桿側, C B 則在活塞側。(A)O(B)X
3. 氣囊式蓄壓器必須垂直安裝, 不得水平安裝。(A)O(B)X
4. 鏈條與鏈輪傳動間隙較大, 亦即正反轉時傳動背隙較大。(A)O(B)X
5. 使用電錶量測電阻值前之零位調整, 係將二測試棒成開路狀態。(A)O(B)X
6. 三用電表指針作全刻度偏轉時, 則歐姆標度之電阻為零。(A)O(B)X
7. 感應型電表之用途專用於直流。(A)O(B)X
8. 所謂額定壓力, 是指儲氣筒所能承受的最高壓力, 超過此一壓力, 儲氣筒即爆裂。(A)O(B)X
9. 一般而言,可用於常壓和真空兩種不同之氣壓系統的同一個閥件,應為直接作動式的方向閥。(A)O(B)X
10. 回轉速度小之壓縮機應選用低黏度潤滑油。(A)O(B)X
11. 蓄壓桶內的積炭過多, 接觸到高溫壓縮空氣時, 可能發生爆炸, 因此, 需要後部冷 卻器冷卻壓縮空氣後, 再送入蓄壓桶。(A)O(B)X
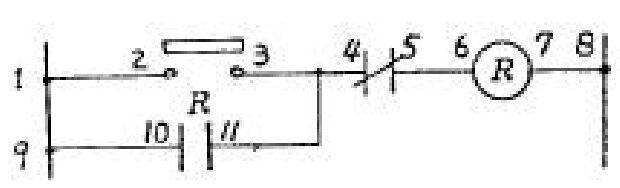
12. 下圖中欲量測繼電器線圈是否斷線, 在靜態測試時使用三用電錶電壓檔, 量測6 、7 兩點。(A)O(B)X
13. 加滑油器的給油, 是採用空氣露點表的原理。(A)O(B)X
14. 當濾蕊上的網目被堵塞時, 可將壓縮空氣反向送入過濾器, 以吹除沾附在濾蕊上的污 物。(A)O(B)X
15. 斜口鉗與尖嘴鉗配合使用時, 可拿來鎖螺絲用。(A)O(B)X
16. 上圖虛線內之組合元件可縮短 a1 極限開關信號之長度(A)O(B)X
17. 如圖所示, 偏心輪2 在滑塊3 做旋轉運動, 又滑塊3在槽4的框內上下運動, 則使得桿5在槽4的左右產生旋轉運動。(A)O(B)X
18. 設計自動裝配之控制迴路時, 首先要瞭解裝配機構所要求之動作及相關條件。(A)O(B)X
19. 利用皮帶式輸送帶連續緊密送料,由快速帶轉至另一慢速帶時,會因速差關係使工件自動分離。(A)O(B)X
20. 如圖所示電路,接線及控制元件功能皆正常,當押下起動控鈕P B 1 電動機及電驛皆不 動作,其可能原因為極限開關L S 2 已作動。(A)O(B)X
21. 電動機正逆轉之電磁開關應作相互連鎖,其目的在防止二只電磁開關同時動作,避免短 路。(A)O(B)X
22. 有一T i m e r 其a 接點在線圈通電時延時閉合, 但線圈斷電時瞬時打開, 這是O F F - D e l a y T i m e r 的特性。(A)O(B)X
23. 搖頭式極限開關之順向動作位置與逆向復歸位置都在同一點上。(A)O(B)X
24. 具N P N 電晶體輸出介面之感測開關可以直接驅動小型負載不需外加電源。(A)O(B)X
25. 裝配左右搖動式氣壓手臂時, 不需考量管線之纏繞、拉扯等問題。(A)O(B)X
1. 依照一般繪氣壓迴路圖原則, 下圖中何者有錯誤 (A) 氣源開關( A S ) (B)啟動開關( S ) (C) 極限開關 a (D) 氣壓缸A 。
2. 與A = X 的功能相同的接線法是那一個 (A) (B) (C) (D)
3. 雙壓力閥在何時才有壓力( 訊號) 輸出 (A) 其中一個輸入口有壓力( 訊號) 輸出 (B) 經指定的一個輸入口有壓力( 訊號) , 並且另一個輸入口沒有壓力( 訊號) (C) 兩個輸入口皆沒有壓力( 訊號) (D) 兩個輸入口同時有壓力( 訊號) 。
4. 下列何者不適合選用磁簧開關設計 (A) 氣壓缸移動速度慢 (B) 氣壓缸移動速度快 (C) 大行程氣壓缸 (D) 氣壓缸出力小。
5. 潤滑器的耐壓性, 以最大使用壓力的 (A) 1 (B) 1 . 5 (C) 2 (D)3 倍施於入口側, 將出口側塞住, 保持1 分鐘, 不得有裂傷、變形。
6. 所謂壓力開關的遲滯性, 指的是什麼 (A) 壓力開關O N 和O F F 之間的壓力差 (B) 壓力開關到達設定壓力所需之時間 (C) 壓力開關實際動作壓力和設定壓力之差 (D) 壓力開關到達設定壓力後到電氣接點導通所需時間。
7. 鏨削工作, 工作要領是 (A) 鏨子要握得緊緊 (B) 眼睛注視鏨子的刃端 (C) 眼睛要注視鏨子柄頭 (D) 要握住鏨子的下端。
8. 我們一啟動馬達時, 保險絲即燒斷或無熔絲開關即跳起, 下列何者不是可能引起的原 因 (A) 保險絲太細或無熔絲開關容量太小 (B) 馬達的啟動方式設計不良 (C) 馬達線圈短路 (D) 馬達電源正常。
9. 氣壓主要管線系統 (A) 不設順向傾斜排水管 (B) 必設順向傾斜排水管 (C) 必設逆向傾斜排水管 (D) 不設逆向傾斜排水管。
10. 氣壓缸於長時間荷重懸吊時, 由於空氣之洩漏, 會自然下降, 為防止此種危險, 可 選擇 (A) 無桿式壓缸 (B) 肘節式壓缸 (C) 剎車氣壓缸 (D) 薄形氣壓缸。
11. 下圖在氣壓源加裝一節流閥, 何者最為正確: (A) 量出控制前進及後退速度 (B) 量入控制前進及後退速度 (C) 量出控制後退速度 (D) 量入控制前進速度。
12. 鋼珠型氣壓振動器, 使用時每1 0 0 0 m A . N . R 的空氣中應 (A) 加3滴潤滑油 (B) 加5滴潤滑油 (C) 加10滴潤滑油 (D) 不須加油。
13. 重負載之雙動氣壓缸調整行進速度時, 節流閥大部份採用 (A) 量入型 (B) 量出型 (C) 同時使用 (D) 量出、量入沒有差別。
14. 電感式感測器無法檢知受測對象, 故障原因不可能是 (A)感測距離太遠 (B)受測對象的材質 (C)感測器之感側面太乾淨 (D) 感測角度過大。
15. 下圖皮帶式輸送帶在運轉時會往右偏移, 是何種原因 (A)兩輪軸中心線不平行, 左邊大右邊小 (B)兩輪軸中心線不平行, 左邊小右邊大 (C)皮帶太緊 (D)皮帶太鬆。
16. 如將三相感應電動機之任意兩電源線對調,則此馬達的 (A)轉速增快 (B)轉速減慢 (C)轉向相反 (D)轉向不變。
17. 下圖為左右搖擺式氣壓手臂, 在裝配管線時, 固定部分的管線應從 (A)氣壓手臂末端 (B)氣壓手臂中間點 (C)氣壓手臂迴轉中心點 (D)離氣壓手臂末端1 / 3 長度處 進入迴轉部分, 才能避免纏繞、拉扯等問題。
18. 下圖的S C A R A 型工業機械手臂屬於何種座標形式 (A)直角座標式 (B)圓筒水平關節座標式 (C)關節手臂式 (D)極座標式。
19. 下圖是一種 (A)分筒聯結器 (B)歐丹聯結器 (C)萬向接頭 (D)凸緣聯結器。
20. 在下圖中將S 投入後指示燈即 (A)繼續亮 (B)熄滅 (C)反覆點滅 (D)只亮一次, 即熄滅。
21. 下列何者不是影響交流感應馬達在緊急切斷電源時過轉量大小的主要因素 (A)馬達轉速 (B)轉動慣量 (C)剎車力量 (D)使用電壓。
22. 一般可程式控制器之輸出接點( 繼電器型) , 一個COM點之額定電流為 (A)1 0 A (B)8 A (C)6 A (D)2 A ( 安培) 。
23. 如圖所示電路相同的四個燈, 當A 1 、A 4 之接點閉合時, (A) G L 1 , G L 2 , G L 3 , G L 4 亮度相同 (B) G L 3 較亮,G L 1,G L 2,G L 4 不亮或微亮 (C) G L 2 較亮,G L 1,G L 3,G L 4 不亮或微亮 (D) G L 4,G L 1較亮, G L 2 , G L 3 微亮。
24. 固定電器器具時 (A)沒有方向性之限制 (B)必須向右對齊 (C)必須向左對齊 (D)依圖示及器具說明固定之。
25. 若感測器導通之電流量為1 0 0 m A,在傳統電路中若要驅動一個D C 2 4 V、4 W 之電 磁閥,應如何處理較恰當 (A) 直接驅動 (B) 先驅動計時器,再由其接點驅動電磁閥 (C) 先驅動計數器,再由其接點驅動電磁閥 (D) 先驅動繼電器, 再由其接點驅動電磁閥。
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)O(B)X
(A)O(B)X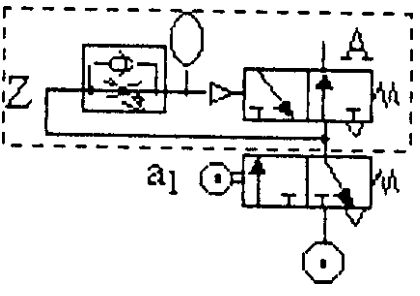 上圖虛線內之組合元件可縮短 a1 極限開關信號之長度(A)O(B)X
上圖虛線內之組合元件可縮短 a1 極限開關信號之長度(A)O(B)X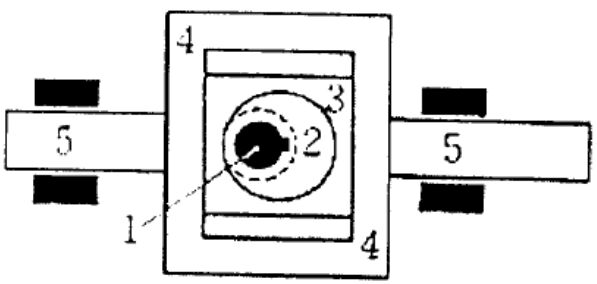 (A)O(B)X
(A)O(B)X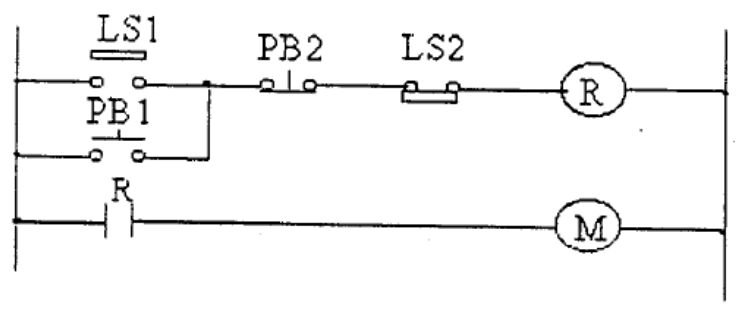 (A)O(B)X
(A)O(B)X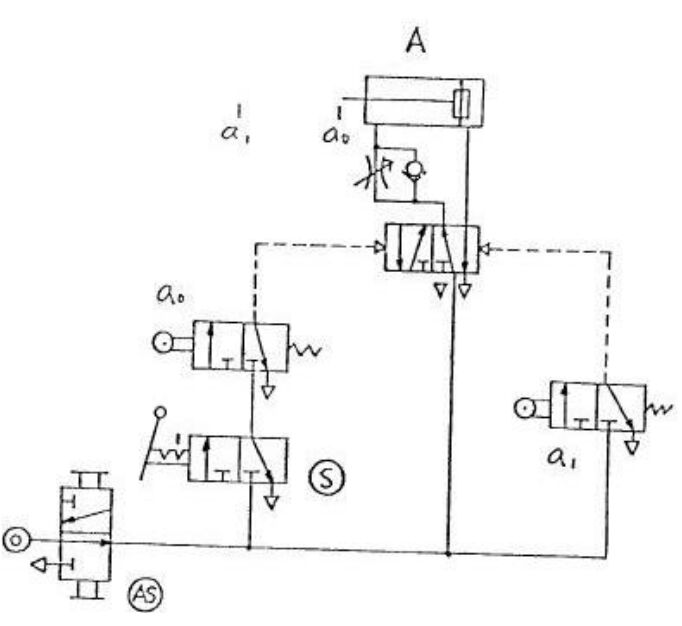 (A) 氣源開關( A S ) (B)啟動開關( S ) (C) 極限開關 a (D) 氣壓缸A 。
(A) 氣源開關( A S ) (B)啟動開關( S ) (C) 極限開關 a (D) 氣壓缸A 。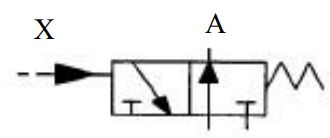 (B)
(B) 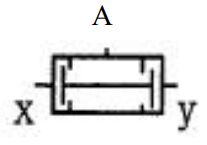 (C)
(C) 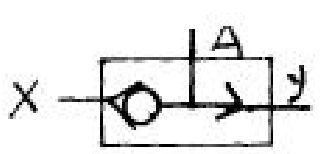 (D)
(D)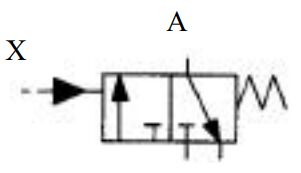
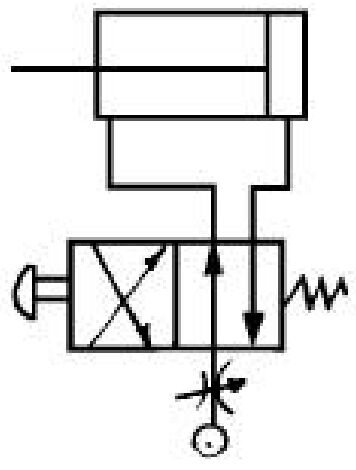 (A) 量出控制前進及後退速度 (B) 量入控制前進及後退速度 (C) 量出控制後退速度 (D) 量入控制前進速度。
(A) 量出控制前進及後退速度 (B) 量入控制前進及後退速度 (C) 量出控制後退速度 (D) 量入控制前進速度。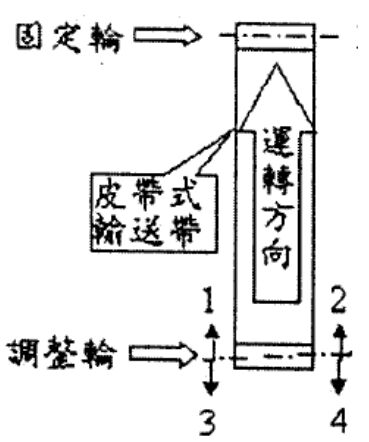 (A)兩輪軸中心線不平行, 左邊大右邊小 (B)兩輪軸中心線不平行, 左邊小右邊大 (C)皮帶太緊 (D)皮帶太鬆。
(A)兩輪軸中心線不平行, 左邊大右邊小 (B)兩輪軸中心線不平行, 左邊小右邊大 (C)皮帶太緊 (D)皮帶太鬆。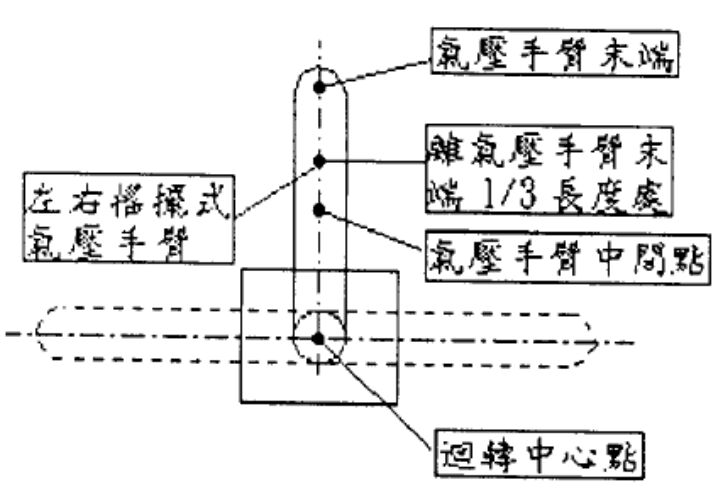 (A)氣壓手臂末端 (B)氣壓手臂中間點 (C)氣壓手臂迴轉中心點 (D)離氣壓手臂末端1 / 3 長度處 進入迴轉部分, 才能避免纏繞、拉扯等問題。
(A)氣壓手臂末端 (B)氣壓手臂中間點 (C)氣壓手臂迴轉中心點 (D)離氣壓手臂末端1 / 3 長度處 進入迴轉部分, 才能避免纏繞、拉扯等問題。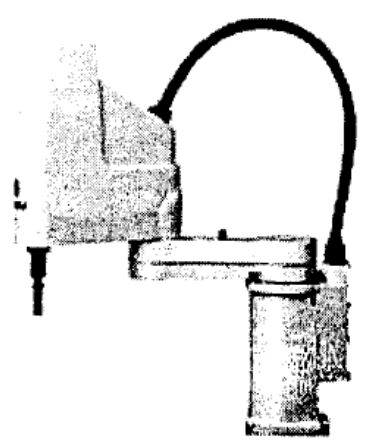 (A)直角座標式 (B)圓筒水平關節座標式 (C)關節手臂式 (D)極座標式。
(A)直角座標式 (B)圓筒水平關節座標式 (C)關節手臂式 (D)極座標式。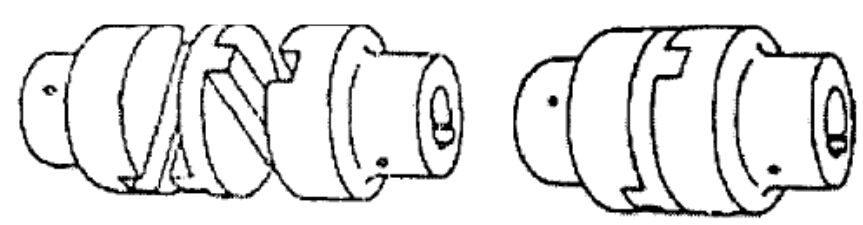 (A)分筒聯結器 (B)歐丹聯結器 (C)萬向接頭 (D)凸緣聯結器。
(A)分筒聯結器 (B)歐丹聯結器 (C)萬向接頭 (D)凸緣聯結器。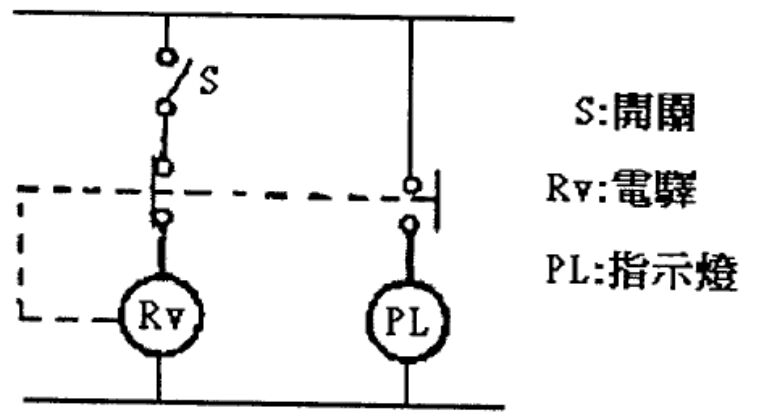 (A)繼續亮 (B)熄滅 (C)反覆點滅 (D)只亮一次, 即熄滅。
(A)繼續亮 (B)熄滅 (C)反覆點滅 (D)只亮一次, 即熄滅。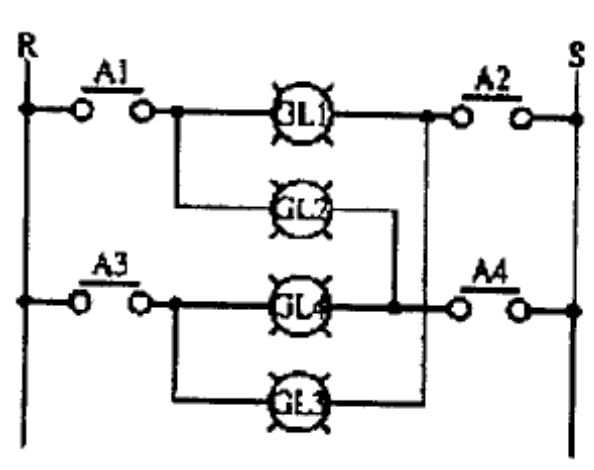 (A) G L 1 , G L 2 , G L 3 , G L 4 亮度相同 (B) G L 3 較亮,G L 1,G L 2,G L 4 不亮或微亮 (C) G L 2 較亮,G L 1,G L 3,G L 4 不亮或微亮 (D) G L 4,G L 1較亮, G L 2 , G L 3 微亮。
(A) G L 1 , G L 2 , G L 3 , G L 4 亮度相同 (B) G L 3 較亮,G L 1,G L 2,G L 4 不亮或微亮 (C) G L 2 較亮,G L 1,G L 3,G L 4 不亮或微亮 (D) G L 4,G L 1較亮, G L 2 , G L 3 微亮。