所屬科目:高中技藝◆工業類◆機電整合
1. 有一支雙線導螺桿在固定位置上,每次旋轉一圈可將螺帽沿螺桿移動固定的距離,則該距離稱為螺距。(A)O(B)X
2. 在繪製視圖之線條時,當輪廓線與中心線重疊時,應優先畫出輪廓線,當輪廓線與隱藏線重疊時,應優先畫出輪廓線,當割面線與中心線重疊時,應優先畫出割面線。(A)O(B)X
3. 有一線性附緩衝的驅動單元。當至端點停止位置需經常改變更換時,要停止位置準確,應正確調整好氣壓缸行程後,變更位置即可準確。(A)O(B)X
4. 為防止氣油壓壓力量表會隨系統壓力變化而抖動,可在壓力量表入口處加裝一個阻尼管。(A)O(B)X
5. 關於量具之使用,塊規可用於校驗游標卡尺及分厘卡,游標高度規可以加裝量錶作平行度量測。(A)O(B)X
6. 一支單桿雙動氣壓缸以垂直方向拉起 42kgf 之重物,其負荷率η=70%、使用壓力 P=6 kgf/cm2、d(桿徑)=1/3 D(缸徑)計,宜選用 缸徑 ф40 之氣壓缸。(A)O(B)X
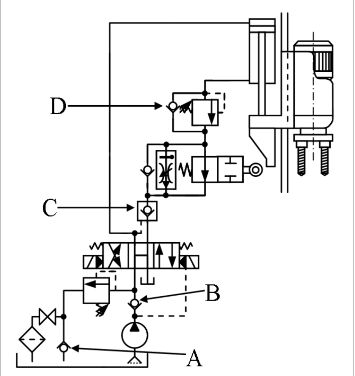
7. 如下圖為自動鑽床的油壓迴路圖,在迴路圖中共有 4 個止回閥(A、B、 C、D 四處),則 A、B、C、D 的順向開啟壓力(cracking pressure)分別約為3.5~5、8~10、0.3~0.5、0.3~0.5 kgf/cm2才能使迴路正常運作又可節省能源消耗。
(A)O(B)X
8. 在真空系統中使用真空破壞設備,其目的為加快真空壓力消失速度,以避免真空產生器被阻塞及縮短輕型物件吸放時間 。(A)O(B)X
9. 共陽極七段顯示器使用 7448 解碼輸入端為 0011,則七段顯示器顯示數字為 3,共陰極七段顯示器使用 7447 解碼輸入端為 1100,則七段顯示器顯示數字為 3。(A)O(B)X
10. 光學編碼器為常用之數位式感測元件,絕對式編碼器不受斷電影響感測,編碼器之 A 相通常用於檢測旋轉方向和位置,使用四倍頻可提升感測解析度 。(A)O(B)X
11. 檢測距離是指檢測物由遠方緩慢靠近,當近接開關產生動作時,從開關前端面至檢測物的距離,而復歸距離則是指開關動作後檢測物緩慢遠離開關,當開關復歸時,從開關前端面至檢測物的距離,一般近接開關的檢測距離較復歸距離為長。(A)O(B)X
12. 直流伺服馬達之定子是線圈繞組,轉子是由永久磁鐵組成,需換向碳刷。(A)O(B)X
13. 一般型直流電源供應器有最大使用功率限制,一般使用電流量係以負載內阻決定,因此一般使用電流量可限制,輸入電源可選擇 AC110/220V 。(A)O(B)X
14. 馬達與機械連接時安裝聯軸器之目的與特性作為功率或轉矩的傳輸,增加機械的可撓性 ,具減震效果。(A)O(B)X
15. 若 PLC 的輸出接點 Y0 至 Y5 控制三支氣壓缸動作,依序分別是 A+B+C+A-B-C-,以一個 byte 值傳送至輸出接點使 A+B-C-同時動作, 則該 byte 值的十六進值應為23 。(A)O(B)X
16. 自動化機器在規劃編輯程式時,應先編輯復歸程式,來防撞機或爆炸的危險。(A)O(B)X
17. 光電開關與變頻器安裝在一起時若發生干擾現象,可更改光電開關位置,調整變頻器的輸出頻率。(A)O(B)X
18. 氣壓管路安裝時,管線長度很長時,可採用環狀配管方式,管路與設備連接處應加裝空氣過濾器,以防異物進入氣壓設備,主管路與空壓機連接處應有伸縮配管的裝置,以防止震動傳遞 。(A)O(B)X
19. L 型球狀六角扳手用於鎖緊螺栓時,扳手上之編號,係指六角沉頭孔之對角尺寸,用球狀頭鎖緊時,不宜使用其他器具加長扭動力臂 。(A)O(B)X
20. 空氣蓄氣筒之功能為使供氣平穩,減少浪壓,作為瞬間消耗大量氣體補充之用,利用大表面積散熱,排除部分凝結水。(A)O(B)X
21. 氣壓間接控制迴路,動力管線與控制管線使用壓力可相同亦可相異。(A)O(B)X
22. 機械式氣壓壓力錶的使用,在一個閉合的管路加上壓力錶,除了指示壓力外,亦可作為檢查有否漏氣的設備元件,氣壓設備在停止使用後,所有的氣壓源均要關閉並且洩壓完畢,以保護壓力錶的使用壽命,壓力錶頭內有注入液油,可以減少指針在壓力變化幅度較大時起到緩衝的作用,降低震動對讀數時的影響。(A)O(B)X
23. 選用電磁閥做為控制氣壓缸運動時,電磁閥的線圈規格不影響氣壓的出力大小,電磁閥流量大小與氣壓缸所承受的負荷得到速度無關,若可能,電磁閥與氣壓缸越近越好,使用間接作動型電磁閥應注意引導壓力的供給 。(A)O(B)X
24. 氣壓馬達與一般電動馬達相比較,氣壓馬達節能效率較佳、轉向變化容易及低速轉動穩定 。(A)O(B)X
25. 使用壓縮空氣時,若調理不良,閥瓣中活動件快速磨耗,工作元件速度不穩定,管路中有水滴。(A)O(B)X
1. 將輸入電壓轉換成時間(脈衝寬度信號)或頻率(脈衝頻率),然後由定時器/計數器獲得數字值的 ADC 是屬於哪一種? (A)逐次比較型 (B)積分型 (C)壓頻比較型 (D)平行比較型。
2. 為維持電子烤箱溫度,以加熱器作為致動器,感測器是熱電偶,將溫度回傳給控制器,控制器再依熱電偶所測得之溫度,作為調整加熱器電力之依據,以維持烤箱所設定之溫度,則系統較適於採用 (A) 程序控制 (B) 數值控制 (C) 順序控制 (D) 位移控制。
3. 調壓閥壓力降太大,且流量顯著減少,原因何者錯誤 (A) 調壓彈簧破損 (B) 閥體內有髒污卡住通路 (C) 有凝結水積聚 (D) 膜片破裂 。
4. 電磁閥之日常檢查,不包含 (A) 電磁線圈升溫情況 (B) 電磁線圈絕緣抵抗測定 (C) 電氣訊號與作動狀態檢查 (D) 各結合部螺絲鬆動之檢查與鎖緊。
5. 欲調整自動化機器上機構或管路等之物理參數時,若電路與控制程式均已完成,應使用與執行下列哪種程式,來縮短調校時間? (A)急停 (B) 復歸 (C)步進 (D) 順序動作。
6. 有一對照式光電開關用來檢測金屬罐是否在正確的軌道位置上,現在該對照式光電開關損壞而感測器與金屬罐的距離只有 1 公分,則維修人員使用以下哪一種感測器暫時代用較不適當? (A) 磁簧開關 (B) 近接開關鏡片 (C) 反射式光電開關 (D) 擴散反射式光電開關 。
7. 有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為 1.8 °,驅動器以半步進法控制步進馬達,馬達輸出軸與導螺桿間配有一 5:1 之減速齒輪組。若導螺桿每轉動 5 圈,滑台移動 20 ㎜,下列敘述何者不正確? (A) 螺桿之導程 L=4 ㎜ (B) 滑台定位之解析度 R=2.0μm (C) 步進馬達每轉所需之脈衝命令(ppr) 為 400 (D) 滑台以平均速 0.6m/min 移動 50 ㎜所需之脈衝命令數為 50000pulses 。
8. 若以一應用類比式線性電位計之高度感測模組,當高度為 20 ㎜時其 PLC 之 AD 輸入值為 1500,高度為 50 ㎜時 AD 輸入值為 3000,工件合格高度為 30 ± 2 ㎜時,則 AD 輸入值做為品管比較區間,下列何者最合適? (A)1800,2200 (B) 1850,2150 (C)1900,2100 (D) 1950,2050。
9. 有關一般型直流電源供應器之敘述,下列何者有誤? (A) 有最大使用功率限制 (B) 一般使用電流量可限制 (C) 一般使用電流量係以負載內阻決定 (D) 輸入電源可選擇 AC110/220V 。
10. 下列有關理想變壓器之特點,何者是錯誤? (A)鐵心不會飽和 (B)無漏磁 (C)導磁係數極小 (D)各線圈的電阻為零。
11. 有關步進馬達之敘述,下列何者最正確? (A) 控制頻率越快,則其轉速越高 (B) 步進角度越小,則其定位解析度越低 (C) 永磁步進馬達在靜止時,不具有相當的保持力 (D) 正常運轉時,其步進數 與控制脈衝頻率成正比 。
12. 有關溫度感測器,下列敘述何者不正確? (A) 熱電偶是利用席貝克(seebeck)效應製成的 (B) PT100 為溫度感測元件,100℃時電阻為100 歐姆 (C) 正溫度係數熱敏電阻元件,當溫度升高時,電阻值會增加 (D) 熱接點是測量溫度的地方,而冷接點則是參考點。冷接點的溫度變化會影響測量結果。
13. 有關近接開關的描述,下列何者正確? (A) 非隔離型近接開關之磁束集中在開關前端 (B) 近接開關對檢測物體的大小、形狀、材質幾乎不受限制 (C) 應答頻率愈大,表示近接開關可檢測的 ON/OFF 反應愈快 (D) 檢測物體進入近接開關動作區內,開關立即感應輸出,不延遲。
14. 氣壓機器使用一段時間,若發現方向閥切換使氣壓缸活塞桿移動一段距離後,負荷 w 才移動,請問原因為 (A) 速度控制閥性能劣化 (B) 繩索受負荷而伸長 (C) 控制管路膨脹 (D) 活塞桿變形。
15. 某 5 bar 壓力原欲使氣壓缸活塞截面積 5 產生 1000N 左右之推力,應 (A) 調整流量為 25cm/min (B) 再提升壓力 12.5bar (C) 更換氣壓缸直徑為 2 倍 (D) 調整壓力 P=15 bar,流量 Q=25cm/min 。
16. 有一單軸螺桿滑台用 AC 伺服馬達驅動,使滑台做往復之直線運動,螺桿導程(Lp)為 5mm,實體減速機構比(i)為 2 ,伺服馬達之分解能(Pt)為 131072 pulse/rev,伺服馬達電子齒輪比(CMX/CDV)為 32768/625,伺服馬達最高轉速限為 3200 rpm,若控制條件:(1)滑台移動距離(S)為 240mm (2)滑台移動時間(ts)為 4.15 秒 (3)滑台加速(ta)及停止減速(td)時間各為 0.15sec,速度-時間如圖所示,則下列敘述何者正確?
(A) 滑台速度 Vc 應為 2.4 m/min (B) 滑台速度 Vc 應為 3.0 m/min (C) 滑台速度 Vc 應為 3.6 m/min (D) 滑台速度 Vc 應為 6.0 m/min 。
17. 有一單軸螺桿滑台用 AC 伺服馬達驅動,使滑台做往復之直線運動,螺桿導程(Lp)為 10mm,實體減速機構比(i)為 5 ,伺服馬達之分解能(Pt)為 131072 pulse/rev,伺服馬達電子齒輪比(CMX/CDV)為 16384/125,伺服馬達最高轉速限為 3200 rpm,若控制條件:(1)滑台移動距離(S)為 240mm (2)滑台移動時間(ts)為 4.15 秒 (3)滑台加速(ta)及停止減速(td)時間各為 0.15sec,速度-時間如圖所示,則下列敘述哪些正確?
(A) 伺服馬達之控制脈波速率(f)應為 10000 Hz (B) 伺服馬達之控制脈波速率(f)應為 20000 Hz (C) 伺服馬達之控制脈波速率(f)應為 30000 Hz (D) 伺服馬達之控制脈波速率(f)應為 40000 Hz。
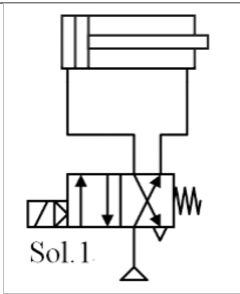
18. 如下圖,欲調控氣壓缸縮回拉力,應在哪個位置加裝什麼裝置?
(A)A加裝減壓閥 (B)B加裝附止回減壓閥 (C)C加裝減壓閥 (D)D加裝附止回減壓閥 。
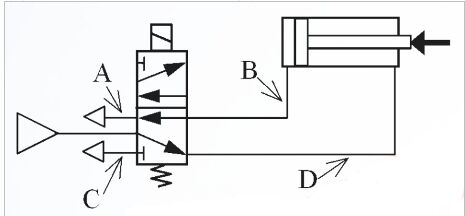
19. 如下圖,操作啟動開關 S 後,下列各種敘述何者正確?
(A) 立即切換至原來位置(使產生脈衝訊號)則氣壓缸 A 不會運動 (B) 立即切換至原來位置(使產生脈衝訊號)則氣壓缸 A 伸出後停留在前端位置 (C) 並“鎖”在通的閥位,則氣壓缸 A 連續作往復運動 (D) 並鎖在“通”的閥位,則氣壓缸 A 伸出至端點再退回到原來位置後停止 。
20. 以下圖為例,下列哪個迴路圖操作功能非為氣壓缸在〝雙手都按下才伸出、雙手都放開才縮回〞?
(A) (B) (C) (D)
21. 一般疊棧機可分為傳統疊棧機與彈性疊棧機,下列何者為傳統疊棧機的優點? (A) 堆疊速度快 (B) 體積小,機動性大 (C) 適合多樣少量生產的工廠 (D) 交叉堆疊方式與堆疊物之尺寸皆可由程式設定與更改。
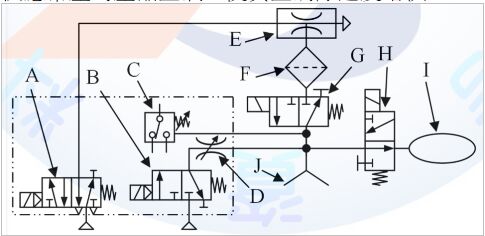
22. 下圖為一套真空產生系統,可利用常壓空氣轉換為真空壓吸取物件,請問〝B〞閥件的功能為何?
(A) 真空壓力開關,檢知真空壓力高低 (B) 供應常壓的壓縮空氣,以轉換真空壓力 (C) 可調節真空破壞之氣流強弱 (D) 供應常壓的壓縮空氣,使真空消除速度增快 。
23. 如下圖為一台以油壓缸(φ150×100×5000)透過鋼索驅動之電梯(W=5000 kgf),若電梯箱上升移動速度為 6 m/min,下列敘述正確?
(A) 油壓缸的出力約 10000 kgf (B) 油壓缸需要的移動速度為 3 m/min (C) 驅動油壓缸的壓油流量需 53 LPM (D) 驅動油壓缸的壓油壓力至少需 200kgf/cm2 。
24. 一部單軸螺桿滑台用 DC 直流馬達驅動,使滑台做往復之直線運動,若 馬達轉速 N m =1440rpm、螺桿所需轉矩 Ts =2 N-m、馬達與螺桿間減速機之減速比 i=25、傳動效率 =59.7 %,則馬達所需馬力 P r =_______W。 (A) 12.1 (B) 16.4 (C) 16.6 (D) 20.2
25. 有一感測器的規格表說明它可以量測空氣壓力的範圍為-0.8 kgf/cm2到 9.2 kgf/cm2之間,感測器有 0.1kgf/cm2 的解析度,+/-0.3 kgf/cm2的重現 率,+/-0.5 kgf/cm2的線性度。若量測的壓力是 6kgf/cm2 ,則實際的壓力範圍是 _______kgf/cm2(A) 5.2~6.8 (B) 5.5~6.5 (C) 5.7~6.3 (D) 5.9~6.1 。
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)O(B)X
(A)O(B)X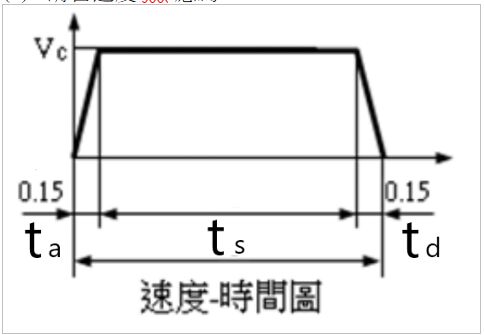 (A) 滑台速度 Vc 應為 2.4 m/min (B) 滑台速度 Vc 應為 3.0 m/min (C) 滑台速度 Vc 應為 3.6 m/min (D) 滑台速度 Vc 應為 6.0 m/min 。
(A) 滑台速度 Vc 應為 2.4 m/min (B) 滑台速度 Vc 應為 3.0 m/min (C) 滑台速度 Vc 應為 3.6 m/min (D) 滑台速度 Vc 應為 6.0 m/min 。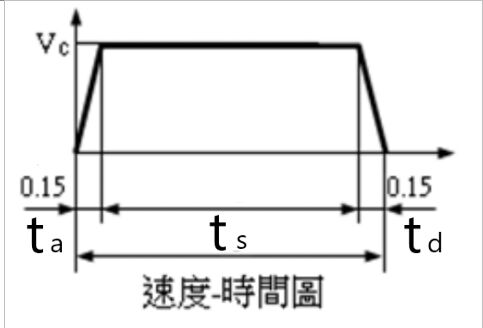
 (A)A加裝減壓閥 (B)B加裝附止回減壓閥 (C)C加裝減壓閥 (D)D加裝附止回減壓閥 。
(A)A加裝減壓閥 (B)B加裝附止回減壓閥 (C)C加裝減壓閥 (D)D加裝附止回減壓閥 。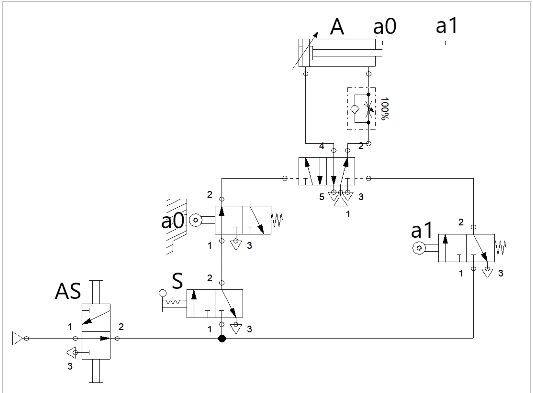
 (A)
(A)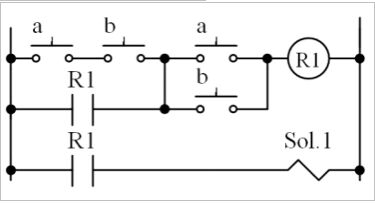 (B)
(B)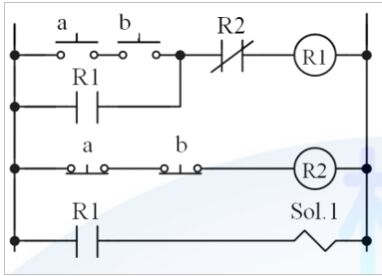 (C)
(C)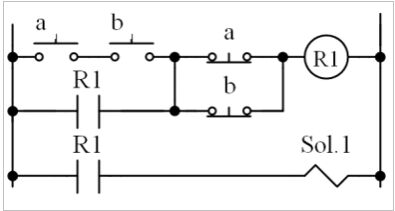 (D)
(D)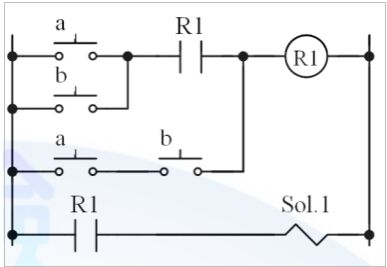
 (A) 真空壓力開關,檢知真空壓力高低 (B) 供應常壓的壓縮空氣,以轉換真空壓力 (C) 可調節真空破壞之氣流強弱 (D) 供應常壓的壓縮空氣,使真空消除速度增快 。
(A) 真空壓力開關,檢知真空壓力高低 (B) 供應常壓的壓縮空氣,以轉換真空壓力 (C) 可調節真空破壞之氣流強弱 (D) 供應常壓的壓縮空氣,使真空消除速度增快 。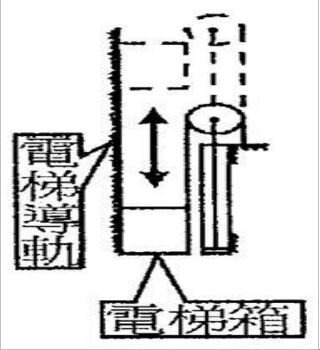 (A) 油壓缸的出力約 10000 kgf (B) 油壓缸需要的移動速度為 3 m/min (C) 驅動油壓缸的壓油流量需 53 LPM (D) 驅動油壓缸的壓油壓力至少需 200kgf/cm2 。
(A) 油壓缸的出力約 10000 kgf (B) 油壓缸需要的移動速度為 3 m/min (C) 驅動油壓缸的壓油流量需 53 LPM (D) 驅動油壓缸的壓油壓力至少需 200kgf/cm2 。