所屬科目:二等船副◆航海學概要
1. 下列何者為航海員利用六分儀所測出來的高度?(A) Altitude(B) Co-Altitude(C) Hour Angle(D) Meridian Angle
2. 航海上所用的距離「浬」,其長度大約多少公尺?(A) 1000(B) 1326(C) 1609(D) 1852
3. 以目視方位線、雷達距離弧、雷達方位線之組合而定位,下列何項組合為精確度最佳?(A) 兩個雷達距離弧的交叉定位(B) 兩個雷達方位線的交叉定位(C) 一個目視方位線及一個雷達距離弧的定位(D) 一個雷達方位線及一個雷達距離弧的定位
4. 船舶吃水在AIS所提供的船舶資料,是屬於何種資料型態?(A) 靜態資料(B) 動態資料(C) 其他資料(D) 航行相關資訊
5. 下列哪顆行星不是航海用行星?(A) 金星(B) 火星(C) 水星(D) 土星
6. 電羅經之靈敏部分,不包括下列那一項?(A) 陀羅球(B) 垂直環(C) 液體連通器(D) 電力控制器
7. 有關ARPA航道線(Navigation Lines)的使用,下列何者較不適合?(A) 當航行於危險區時,標誌航道的範圍(B) 當航行於港區時,標誌航道的範圍(C) 當航行於分道航行區時,標誌航道的範圍(D) 當航行於洋區時,標誌航道的範圍
8. ECDIS的主要功能為下列何者?(A) 提倡環保無紙化海圖(B) 節省人力配置(C) 船舶自動航行(D) 提供安全航行
9. 下列那一項回波最容易在狹窄水道中發生?(A) 二次蹤跡波(B) 三次蹤跡波(C) 多重回波(D) 雨雪雜波
10. X頻帶雷達頻率約為多少?(A) 3000 KHz(B) 10000 KHz(C) 3000 MHz(D) 10000 MHz
11. 某船以磁羅經航行,磁羅經航向與真航向皆為070°,若該海域磁差為4°W,則當時之自差為何? (A) 0° (B) 4° E (C) 4° W (D) 6° E
12. 某船4月3日在L27°30.0'N,λ072°35.0'W處,由航海曆查得UT 04-10-48,求當時之ZT為何 ? (A) 4月2日09-10-48 (B) 4月2日23-10-48 (C) 4月3日23-10-48 (D) 4月4日09-10-48
13. 主操舵裝置應有足夠的力量,於船舶最大吃水,最大航速時,將舵自一舷的35度轉至另一舷的30度,其時間不超過幾秒? (A) 28秒 (B) 30秒 (C) 32秒 (D) 35秒
14. 下列有關電子航海圖(ENC)資料之更新的敘述,何者錯誤?(A) 適用SOLAS 2024第五章第27條關於海圖更新的規定(B) 更新資料必須是官方或所授權機構提供的(C) 更新資料會結合在原資料之後,再一起儲存於固定位置(D) 可以手動更新也可自動更新,但二者有所區隔
15. 1990年7月7日,航海員以船用六分儀觀測月亮下緣高度得hs 21° 53.8',IE 2.0'在弧外(off the arc),眼高10.5m,當時月亮H.P. 54.9',則觀測高度Ho為何? (A) 22° 51.5' (B) 22° 53.5' (C) 22° 55.5' (D) 22° 57.5'
16. 某船由30° S先向北航行300浬,再分別向東,向南和向西各航行300浬,則該船最終點在啟航點的何方? (A) 東方 (B) 西方 (C) 同一點 (D) 無法確定
17. 關於影響雷達性能的因素,何者錯誤?(A) 雷達發射功率增加一倍,其探測距離可增加1/2倍(B) 較窄的水平波束寬度,方位精確度較佳(C) 雷達的最小探測距離等於脈波寬度的一半(D) 雷達波長較長時,探測距離較遠
18. 電羅經旋轉儀(Gyroscope)之視運動(Apparent rotation)中,於北緯度,轉軸水平一端指向北方,因地球之自轉所致,將使輪軸之北端向何方向轉動? (A) 東 (B) 南 (C) 西 (D) 北
19. 有關電子海圖顯示與資訊系統(ECDIS)之航路規劃功能的敘述,下列何者錯誤?(A) 可以規劃多條航路(B) 穿越警示區時會有警示(C) 可以設定偏航警示(D) 受限於投影方式僅可規劃直線航路
20. 1990年8月3日,航海員以船用六分儀觀測牛郎星(Altair)高度得hs 62° 37.5',IE 2.0'在弧內 (on the arc),眼高18.5m,則觀測高度Ho為何? (A) 62° 24.4' (B) 62° 25.4' (C) 62° 26.4' (D) 62° 27.4'
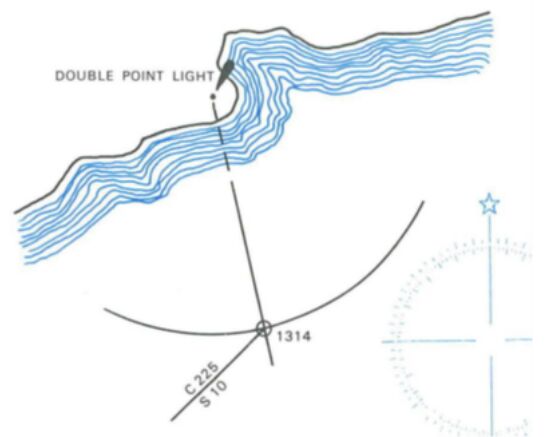
21. 如圖所表示的1314船位是使用何種方式定位?(A) 兩疊標交叉定位(B) 單一目標方位與距離定位(C) 一目標方位與另一目標距離定位(D) 一疊標與另一目標方位定位
22. 關於PID自動舵的航向控制參數的意義,下列敘述何者錯誤? (A) 依照偏航角的大小,依比例參數之值產生偏舵角以控制船舶返回原航項的控制方法,稱為比例控 制 (B) 考慮到風壓差因時間累積而產生偏航的偏舵角控制參數,稱為積分控制 (C) 考慮到與船艏偏航速度的大小產生偏舵角的控制參數,稱為微分控制 (D) 當船舶的操縱性能因裝載、航速或風浪等環境發生變化時,PID自動舵的控制參數亦能隨之自動 相應變化
23. 關於蘇澳燈塔的光弧,在燈表的附註內容為:W. 164°-210°, R. -240°, W. -268°, R. -303°, W. -073°,則船舶自海面觀察蘇澳燈塔燈光的敘述,何者錯誤? (A) 燈塔位於船之方位164°至210°之間時,所見燈光為白色 (B) 燈塔位於船之方位210°至240°之間時,所見燈光為紅色 (C) 燈塔位於船之方位240°至268°之間時,所見燈光為白色 (D) 燈塔位於船之方位268°至073°之間時,所見燈光為白色
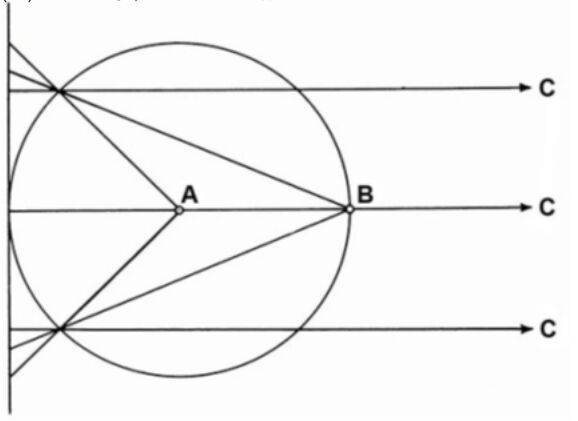
24. 如圖所示,選出錯誤的敘述項目。(A) 此圖表示方位投影或天頂投影(B) 當投射點位於A時,稱為球心切面投影(C) 當投射點位於B時,稱為球面透視切面投影(D) 當投射點位於C時,稱為正割切面投影
25. 關於磁羅經自差的校正,下列敘述何者錯誤?(A) 鋼船會在其「硬鐵」(hard iron)產生感應磁力(B) 地球磁場與船體磁場共同影響磁羅經的指向(C) 測量磁場強度的單位稱為「高斯」(gauss)(D) 降低磁場強度的程序稱為「消磁」(degaussing)
26. 關於測深儀的原理與使用,下列敘述何者錯誤?(A) 水中聲波會因海水鹽度(Salinity)而改變(B) 水中聲速一般校正為每秒1500公尺(C) 頻率較高的聲波其速度較低頻聲波快(D) 使用20Khz~215Khz的超聲波可避免俥葉產生噪音的干擾
27. 關於測速儀(Speed log)的敘述,下列選項何者錯誤?(A) 在海上,速度的測量以海床(sea floor)為參考時,得到對地速率(B) 海上速度的測量可以使用水壓、電磁感應或聲波作為測量媒介(C) 電磁感應測速儀以海水通過船殼速率為參考,只能測得對水速率(D) 杜普勒測速儀以聲波相對運動頻率變化為原理,只能測得對地速率
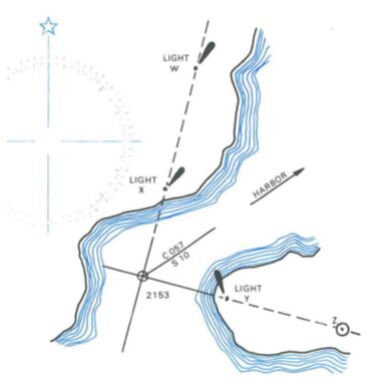
28. 如圖所示,採用的方法為那一選項?(A) 三目標交叉方位定位(B) 兩組疊標方位交叉定位(C) 一組疊標方位與另一目標方位交叉定位(D) 一目標方位與另一目標距離交叉定位
29. 1990年6月25日,DR船位L 32°18' S,λ 148°20' E,觀測太陽,ZT 06-18-25,求觀測時間太陽GHA? (A) 123°56.9' (B) 124°00.1' (C) 124°24.3' (D) 124°36.8'
30. 已知測深儀的校正聲波速度為每秒1500公尺,若該裝置傳送聲波的兩脈波間的休止時間為 1秒,則該測深儀能夠紀錄的最大水深為多少公尺? (A) 375 (B) 750 (C) 1125 (D) 1500
31. 關於雷達假回波(False echo)的敘述,下列選項何者錯誤? (A) 假回波指雷達顯示目標出現,但實際該位置並無目標 (B) 間接回波為目標回波被船上桅杆或煙囪等反射進入天線所造成的假象 (C) 多次回波為近距離目標的回波在目標與本船間作多次反射所造成,以最遠的回波為真回波 (D) 旁波回波為分散於主波兩旁能量較小的雷達波所造成的假象
32. 關於地球磁場(Terrestrial magnetism)的敘述,下列選項何者錯誤?(A) 若磁羅經的北極指針為正極(positive pole),則地球磁場的磁北極應為負極(negative pole)(B) 進入地球表面磁通量線(flux lines)的水平角稱為磁傾角(angle of magnetic dip)(C) 磁傾角在地磁北極為0°(D) 通常將磁傾角分成水平(H)與垂直(V)兩個分量
33. 下列那一選項為國際海事組織發布船舶導航相關符號中,表示本船雷達天線位置符號?(A)(B)(C)(D)
34. 關於影響雷達性能的因素,選出錯誤的敘述?(A) 雷達脈波寬度寬的所含功率較大,探測距離可以較遠(B) 雷達脈波寬度短的,其距離分解力即近距離探測力也較佳(C) 雷達的最小探測距離等於脈波寬度的一半(D) 雷達波長較長的,其方位與距離分解力都比波長短的高
35. 1990年6月21日DR L 33°50' S,λ 151°10'W,以表列時間法計算太陽中天時間,若當時測太陽觀測高度為Ho 32°40.5',求當時觀測者緯度。 (A) L 33°46' S (B) L 33°48' S (C) L 33°50' S (D) L 33°53' S
36. 某輪10月20日基隆ZT1600自基隆港(25°08' N,121°46' E)出發,航向日本東京(35°45' N,139°45' E),航速18節,航行距離1124海浬,求東京時間的預計到達時間(ETA)。 (A) 10月22日0626 (B) 10月22日0826 (C) 10月23日0726 (D) 10月23日0926
37. 某船航向036°,航速15節,0800觀測A燈塔方位012°,0830再觀測A燈塔方位336°,若航向與航速不變的情況下,求A燈塔正橫時距離。 (A) 4.2浬 (B) 4.5浬 (C) 4.8浬 (D) 5.2浬
38. 航行中必須維持推算船位,圖中1030推算位置的描繪是依據下列選項中的那一個原則?(A) 至少每整點小時繪製一次(B) 每一次改變航向或航速之後(C) 獲得定位或航進定位之後(D) 繪出單一位置線之後
39. 我國海軍大氣海洋局出版的海圖,其使用的高度基準面為?(A) 平均海平面(Mean sea level)(B) 平均高潮面(Mean high water)(C) 平均大潮高潮面(Mean high water spring)(D) 平均大潮高高潮面(Mean higher high water spring)
40. 某船杜普勒測速儀的發射頻率為400Khz,功率20W,以30°角向前發射水下音波,若測得海底回波的頻率為405Khz,若水中音速為每秒1500公尺,則該船的速率約為幾節? (A) 15.7 (B) 18.5 (C) 21.0 (D) 24.2
 阿摩線上測驗
登入
阿摩線上測驗
登入