 阿摩線上測驗
阿摩線上測驗
題組內容
五、對於x結構的無線RC遙控四軸機(quadcopter)如下圖所示,其中m2、m4順時針旋轉, m1、m3 逆時針旋轉。假設理想馬達的拉力與轉速成正比。請依力學原理探究,上 下、左右、前後的各種飛行方向如何達成?然後回答下列問題: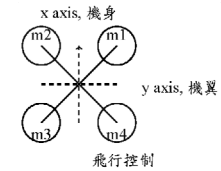
⑵前述為手動控制,若操作不當,新手可能會墜機;想藉由 PID 協助,請問至少需 幾個 PID 控制來協助? PID 控制需誤差資訊,如何獲得(實務上解釋即可,不 需專業術語)?(7 分)
詳解 (共 1 筆)

hchungw
詳解 #5948287
要使四軸飛行器穩定地飛行,通常需要至少三個PID控制器,分別控制以下三個動態軸:
Pitch(俯仰):四軸飛行器前後傾斜的角度。
Roll(滾轉):四軸飛行器左右傾斜的角度。
Yaw(偏航):四軸飛行器左右旋轉的角度。
為了使飛行更加平穩,可能還需要一個額外的PID控制器來控制高度或垂直速度。
獲取誤差資訊的方法:
實務上,四軸飛行器上通常裝有一些感測器來提供即時的運動信息。最常用的感測器有:
陀螺儀(Gyroscope):它可以測量飛行器在Pitch、Roll、和Yaw軸上的角速度。
加速度計(Accelerometer):它可以測量在X、Y和Z軸上的加速度,從中可以推算出俯仰和滾轉角度。
磁力計(Magnetometer):它可以測量地磁場,提供偏航方向的信息。
氣壓計(Barometer):它可以測量大氣壓,用於估計飛行高度。
當你知道飛行器的期望狀態(例如期望角度或高度)和實際狀態(由上述感測器提供)時,你就可以計算出誤差。這個誤差將被用作PID控制器的輸入,PID控制器會計算出需要對飛行器的馬達施加的控制信號,以使飛行器達到期望的狀態。
例如,如果你希望飛行器在Roll軸上保持水平,但加速度計告訴你它偏離了5度,那麼誤差就是5度。PID控制器將嘗試糾正這一誤差,使飛行器回到水平狀態。