所屬科目:國營事業◆自動控制
1.考慮閉迴路控制系統,下列何者不是必要方塊元件?(A)受控體 (B)控制器 (C)抑制器 (D)回授感測器
2.人工智慧 AI 屬於下列何者控制領域?(A)古典控制 (B)拉普拉氏 (C)轉移函數 (D)深度學習
3.下列何者非控制系統標準測試訊號?(A)步級函數 (B)斜坡函數 (C)拋物線函數 (D)隨機函數
4.有關控制系統穩定性,下列敘述何者錯誤?(A)羅斯-赫維茲準則判斷系統穩定性是屬於定性分析(B)有界輸入有界輸出判斷系統穩定性是屬於定性分析(C)奈氏圖準則判斷系統穩定性是屬於定量分析(D)波德圖判斷系統相對穩定性是屬於定量分析
5.考慮G(s) = (s + 3)⁄(s + 1)(s+ 2)(s + 3),下列敘述何者錯誤?(A)s= −3 稱為 G(s)的零點 (B)s= −1 稱為 G(s)的極點(C) s= −2 稱為 ?(?)的極點 (D) s = −3 並非是G(s)的極點
6.考慮系統響應,下列敘述何者正確?(A)系統響應由初始條件決定,外加輸入為零,稱為零狀態響應(B)初始狀態均為零,系統響應僅由外加輸入決定,稱為零輸入響應(C)系統零狀態響應相當於求轉移函數的解(D)系統零輸入響應不等於求特性方程式的解
7.關於齒輪列參數定義,N1⁄N2為齒輪的齒數,T1⁄T2為齒輪的轉矩,r1⁄r2為齒輪的半徑比,θ1⁄θ2為齒輪的角位移,下列關係式何者正確? (A) T1⁄T2 = N2⁄N1 (B) N1⁄N2 = r1⁄r2 (C) T1⁄T2 = θ1⁄θ2 (D) θ1⁄θ2 = N1⁄N2
8.有關機械系統之摩擦力,下列敘述何者錯誤?(A)阻止物體開始運動的阻力稱為靜摩擦力 (B)庫倫摩擦力等於靜摩擦力加上滑動摩擦力(C)黏性摩擦力通常與物體運動速度成正比 (D)靜摩擦力與庫倫摩擦力不可能同時出現
9.有關根軌跡,下列敘述何者錯誤?(A)根軌跡的起點始於開路極點 (B)根軌跡的終止於開路零點(C)根軌跡對稱於虛軸 (D)根軌跡在虛軸的交點可由羅斯表求出
10.有關控制系統的頻域規格,下列何者錯誤?(A)最大超越量 (B)共振峰值 (C)頻寬 (D)截止率
11.有關控制系統的波德圖,下列敘述何者正確?(A)利用轉移函數之圖解法僅能求得系統穩定性 (B)轉移函數包括兩個圖形,分別為大小與相位圖形(C)大小與相位圖形均繪在實數紙尺寸上 (D)頻率以整數等均間隔標示
12.下列何者為線性系統?(A) y(t)=2u(t) (B) y(t)=u(t)+1 (C) y(t)=u2(t) (D) y(t)=u2(t)+1
13.有關典型二階系統,其中 ξ 稱為系統的阻尼比(damping ratio),系統為過阻尼表示:(A) ξ = 0 (B) 1 > ξ > 0 (C) ξ = 1 (D) ξ > 1
14.有關閉迴路控制系統,下列敘述何者錯誤?(A)降低系統對參數變化的靈敏度 (B)無穩定性的問題(C)增強系統對干擾及雜訊免疫力 (D)降低系統的穩態誤差
15.下列何者不是控制系統的頻域分析方法?(A)根軌跡圖(Root locus) (B)奈氏圖(Nyquist plot)(C)波德圖(Bode plot) (D)尼可士圖(Nichols chart)
16.考慮 A = 有重根時,下列何者不是它的特徵向量? (A) P = (B) P =(C) P = (D) P =
17.考慮 A = [,其系統可控制性及可觀測性為何?(A)系統可控制且可觀測 (B)系統不可控制但可觀測(C)系統可控制但不可觀測 (D)系統不可控制且不可觀測
18.考慮控制系統的特性方程式為 s4 +s3 + 2s2 + 2s + 3 = 0,其根分佈情形,下列敘述何者正確?(A)兩個根在右半平面,兩個根在左半平面(B)兩個根在虛軸上,兩個根在左半平面(C)兩個根在左半平面,一個根在右半平面,一個根在虛軸上(D)兩個根在虛軸上,兩個根在右半平面
19.關於 PID 控制器,下列敘述何者錯誤?(A) PI 控制器,增加系統型式,改善穩態誤差 (B) PD 控制器,增加系統相對穩定性(C) PI 控制器,降低系統相對穩定性 (D) PD 控制器,相當為高通濾波器,有利於雜訊抑制
20.關於調整 PID 控制器的 Ziegler-Nichols 法則,下列敘述何者錯誤?(A)調試方式首先將積分和微分增益設置為零,然後比例增益從零開始逐漸增加,一直到達極限增益(B)讓 PID 迴路在雜訊抑制上有最好的效果(C)有「1/4 振幅衰減」的特性,使系統第二次過衝量是第一次 1/4 的特性(D)此方法調適到參數會有較小的增益及較小的過衝
21.關於控制系統設計之頻域規格,下列敘述何者錯誤?(A)截止頻率是衡量暫態響應速度 (B)頻寬是衡量響應速度與雜訊抑制力(C)共振峰值是衡量閉迴路相對穩定性 (D)相位界限是衡量閉迴路相對穩定性
22.關於控制系統設計之時域規格,下列敘述何者正確?(A)系統阻尼是衡量穩態響應時間 (B)安定時間是衡量暫態響應速度(C)上升時間是衡量相對穩定性 (D)穩態誤差是衡量追蹤精度
23.關於頻域補償設計之相位領先與落後,下列敘述何者錯誤?(A)相位領先補償器視為 PD 控制器改良型 (B)相位落後補償器視為 PI 控制器改良型(C)相位領先-落後補償器視為 PID 控制器改良型 (D)設計方法主要工具為根軌跡圖
24.考慮單位回授控制系統,開迴路轉移函數為G(s) = 1/(s2 + s + 1),則閉迴路的特性方程式為下列何者?(A)s2 + s + 1 = 0 (B) s2+ s + 2 = 0 (C) s2 + 2s + 1 = 0 (D)s2+ 2s + 2 = 0
25. te−at 其拉氏轉換的解為下列何者?(A) 1⁄s+ a) (B) s⁄(s + a) (C) 1/ (s + a)2 ⁄ (D) s⁄(s + a)2
26.具有回授作用,若誤差值不為 0 時可自動修正誤差值的控制屬於?(A)閉路控制系統 (B)開路控制系統 (C)開關控制系統 (D)數位控制系統
27.對於類比控制系統的敘述,下列何者正確?(A)以數位碼或脈波來傳送資料的系統 (B)訊號與連續時間 t 有絕對函數關係(C)輸入與輸出訊號必須滿足重疊定理的系統 (D)訊號與連續時間 t 非絕對函數關係
28.輸入與輸出訊號必須滿足重疊定理的系統,稱之?(A)閉迴路控制系統 (B)類比控制系統 (C)線性控制系統 (D)數位控制系統
29.控制變數為機械位置、角度及速度是屬於何種回授控制系統之控制變數?(A)伺服機構 (B)程序控制 (C)自動調整 (D)線性系統
30.控制變數為溫度、壓力、流量、液位、濕度或 PH 值是屬於何種回授控制系統之控制變數?(A)線性系統 (B)自動調整 (C)伺服機構 (D)程序控制
31.多項式s(s + 2)(s+ 3) + K(s + 1) = 0,將會有幾個根軌跡?(A)一個根軌跡 (B)二個根軌跡 (C)三個根軌跡 (D)四個根軌跡
32.控制系統設計之首要條件為系統必須保持?(A)實用性 (B)穩定性 (C)操作方便 (D)容易維修
33.控制系統中強調輸出訊號振幅不可過大,是屬於系統設計之?(A)絕對穩定性設計 (B)相對穩定性設計(C)阻尼設計 (D)保護設計
34.一個控制系統設計有四個步驟:A.系統設計、B.數學描述、C.建立模型、D.系統分析,此四步驟的先後順序為何?(A) A→B→C→D (B) C→B→D→A (C) B→C→D→A (D) A→D→B→C
35.第三次工業革命是指?(A)蒸汽機的發明,機械自動化 (B)電的發明,電氣自動化(C)工業電腦的發明,生產自動化 (D)物聯網、人工智慧的結合,生產智動化
36.轉移函數是描述線性時不變系統的動態特性的數學表示。它包含了一些參數,這些參數可以用來描述系統的特性,但不包含下列哪一項參數? (A)響應速度 (B)阻尼 (C)頻率響應 (D)頻寬大小
37.克希荷夫電壓定律(KVL)其方程式為?(A) v(t) = i(t)R (B) ∑i(t) = 0 (C) ∑v(t) = 0 (D) i(t) =
38.積分控制器(I)在控制系統中,具有何特點?(A)有穩態誤差存在 (B)僅可消除穩態誤差(C)能消除穩態誤差,但輸出響應慢 (D)可增進系統穩定性,但有穩態誤差存在
39.下列哪一種控制器可增進系統穩定性,但有穩態誤差存在?(A) PID 控制器 (B) PI 控制器 (C) PD 控制器 (D) P 控制器
40.下列何者非為使用頻域分析法之優點?(A)不須求出特性根,可直接以圖解法來做分析 (B)以正弦波產生器及精確儀器設備,就可做測試(C)可將外界干擾訊號的不良影響,降至最低 (D)和控制系統的複雜程度無關,只適用於線性系統
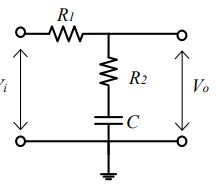
41.一 RC 電路如【圖 41】,求其轉移函數 G(s)?(初始值均為 0)(A)(B)(C)(D)
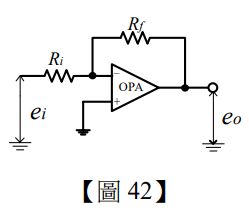
42.如【圖 42】所示,運算放大器電路屬於哪一類控制器?(A)比例控制器(P)(B)比例微分控制器(PD)(C)積分控制器(I)(D)比例積分控制器(PI)
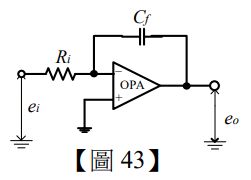
43.依據【圖 43】比例控制器電路標示 Ri為電阻、Cf 為電容,下列敘述何者正確?(A) Zf = Cfs (B) Zi = Ri (C)(D)
44.下列敘述何者正確?(A)(B)(C)(D)
45.承第 44 題,比例積分控制器電路標示 Ri、Rf 為電阻、Cf 為電容,積分時間 Ti? (A) RiRf (B)(C) (D) RfCf
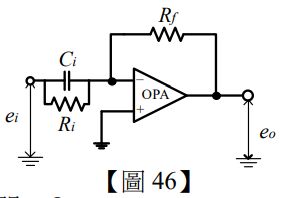
46.下列敘述何者正確?(A)(B) Zi = Rf (C)(D)
47.承第 46 題,比例微分控制器電路標示 Ri、Rf 為電阻、Ci 為電容,微分時間 Td? (A) RiRf (B)(C) (D) RiCi
48.一 RL 電路如【圖 48】,求其轉移函數 G(s)?(初始值均為 0)(A)(B)(C)(D)
49.求此控制器之微分時間 Td? (A) (B) (C) (D)
50.承第 49 題,求此控制器之比例增益常數 Kp? (A) RiCi + RfCf (B) (C) (D)
 阿摩線上測驗
登入
阿摩線上測驗
登入
 有重根時,下列何者不是它的特徵向量? (A) P =
有重根時,下列何者不是它的特徵向量? (A) P = (B) P =
(B) P = (C) P =
(C) P = (D) P =
(D) P =
 ,其系統可控制性及可觀測性為何?
,其系統可控制性及可觀測性為何?



 (C)
(C)  (D) RfCf
(D) RfCf
 (C)
(C) (D) RiCi
(D) RiCi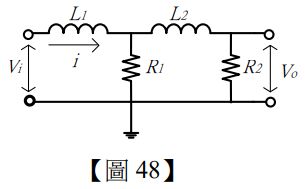




 (B)
(B)  (C)
(C)  (D)
(D)
 (C)
(C)  (D)
(D)