所屬科目:電動車概論
1. 若有一電動車直流無刷電動機之驅動器模組,其驅動器模組電壓規格為 96V,電池 電壓為 48V,則須在電池與驅動器模組之間加入何種線路? (A)整流器;(B)調速器;(C)降壓型轉換器;(D)升壓型轉換器
2. 有關用於電動車之動力電池模組,下列工作特點何者有誤? (A)工作溫度區間小;(B)輸出功率大;(C)自放電率低;(D)放電平穩
3. 有關電動車電池選用需考量之因素,下列何者有誤? (A)安全性;(B)容量匹配;(C)環境溫度與電池尺寸;(D)美觀
4. 下列何者是高壓電控制器預充(Precharge)功能之應用? (A)控制電流大小;(B)保護功率元件不被高壓突波破壞;(C)偵測電池溫度;(D)控 制電池高壓電輸出或輸入開關
5. 電動車大多使用控制器區域網路(Controller Area Network,簡稱 CAN 或 CAN Bus) 的通訊協定,下列有關 CAN Bus 之敘述何者有誤? (A)訊息的優先次序有仲裁機制;(B)即時的資訊傳輸;(C)有偵錯機制;(D)易受到 電訊干擾
6. 近年來整車資料通訊的主要標準為下列何種協定? (A)RS232;(B) K Line;(C) CAN Bus;(D) MOST
7. 無刷直流電動機之霍爾轉速感測器的方波訊號頻率,與下列何者有關? (A)與轉速成正比;(B)與轉速成反比;(C)不受轉速影響;(D)與轉速二次方成正比
8. 有關電動車 12VDC,使用低電壓直流轉換(LDC),下列何者不屬 LDC 之功能? (A)一個輸入的低壓端額定電壓為 12V,在充電和放電過程中在 9V 到 16V 之間變 化,額定充電和放電功率為 1kW-1.5kW; (B)輸出電流在 70A 至 100A 左右; (C)開關頻率可以從 50kHz 變到 70kHz; (D)由於安全原因,高壓端和低壓端之間不需要有電氣隔離,在這種情況下,使用 低頻變壓器
9. 有一個 6 極感應式電動機,滿載時轉子轉速為 1140 rpm,定子電源頻率為 60 Hz, 求其滿載時之轉差率? (A)0.03;(B) 0.04;(C) 0.05;(D) 0.06
10. 一般機車行車記錄器可偵測碰撞、機車傾倒等,主要是依賴下列何種感測器? (A)G sensor;(B) GPS;(C) CCD;(D) Hall sensor
11. 有關電動車應用,下列何種儲能元件的功率密度高,可以在短時間放出/接收超過 系統額定電流的能量? (A)超級電容;(B)鋰離子電池;(C)鋁離子電池;(D)鎳氫電池
12. 下列何者非有刷電動機之缺點? (A)碳刷磨耗完必須更替; (B)價格便宜; (C)壽命較短; (D)碳刷摩擦的過程易產生火花
13. 三相感應電動機的無負載實驗(No Load Test),其主要目的為何? (A)測試轉差率; (B)測試轉速特性; (C)求等效電路中的等效阻抗; (D)求等效電路中的激磁導納
14. 車輛偵測技術以光學感測器(紅外線),其最大感測範圍為多少公尺? (A) 10 公尺; (B) 50 公尺; (C) 200 公尺; (D) 500 公尺
15. 車用控制器之類比數位轉換器(Analog-to-Digital Converter, ADC),若其位元長度為10 bits,檢測電流範圍在 0-25 A,則其電流解析度為何? (A) 2.5 mA;(B) 19.5 mA;(C) 24.4 mA;(D) 2.5 A
16. 電動車電池管理系統中,不具備下列何者功能? (A)輸出短路保護; (B)車速偵測計算; (C)電芯過溫保護; (D)電池殘餘電量
17. 有關 6 相、20 齒之可變磁阻型步進電動機,其步進角θ是多少度? (A) 6;(B) 5;(C) 4;(D) 3
18. 有關車用氣囊之敘述,下列何者有誤? (A)需加速度感測器; (B)駕駛座氣囊容量大約 60 公升; (C)點火元件由大約 80 kHz 頻率的交流脈衝觸發; (D)副駕駛座氣囊容量大約 30 公升,可以在約 30 ms 內被充滿
19. 在電動車的電池充電系統中,下列何種電路是可以達到降低直流充電輸出電流的漣 波雜訊,提供穩定的充電電流以及保護充電系統等功能? (A)主動式輸入濾波電路; (B)保護電路; (C)輸出濾波電路; (D)被動式輸入濾波電路
20. 感測器是汽車很重要的元件,用來量測及監控各系統之運作情況,即時提供正確的 訊號給電腦,下列何者非感測器控制電路的必要元件? (A)搭鐵;(B)焊錫;(C)電源;(D)訊號線
21. 電子控制單元(Electronic Control Unit, ECU)是汽車電子控制系統的重要組成,有關 ECU 組成之單元不包含下列何者? (A)電源; (B)微處理器; (C)通訊單元; (D)感測器端的輸出
22. 在 1980 年代就有電動汽車的製造,但是一次充電行駛里程一直無法達到令人滿意 的程度,造成電動車產業遲遲沒有發展起來,因此電動車動力系統的電能分配是電 動車產業的重要技術,下列何者可實現電動車動力系統裡電能的最佳分配? (A)電能顯示系統; (B)電能消耗系統; (C)充電控制系統; (D)電能管理系統
23. 電動車有別於現有燃油車可以至加油站充填燃油,電動車需至充電站充電,充電站 由多種技術組成,下列何者非充電站的主要組成之一? (A)後台監控系統; (B)影像監控系統; (C)溫濕度控制系統; (D)遠端監控系統與資料庫
24. 目前市售二次電池有鉛酸電池、鎳鎘電池、鎳氫電池及鋰離子電池,下列何種電池 的能量密度最高,因此被用在電動車能源上? (A)鉛酸電池; (B)鎳鎘電池; (C)鎳氫電池; (D)鋰離子電池
25. 電池管理系統(Battery Management System, BMS)為發展電動車之關鍵技術,下列何 者非 BMS 的主要功能? (A)計算電池壽命; (B)監控電池電壓; (C)提供電池預警保護; (D)延長電池的使用壽命
26. 電動車充電的類型有很多種,其中車對家(Vehicle-to-Home, V2H)和車對網(Vehicleto-Grid, V2G)兩種充電類型最大的差異為何? (A) V2H 可雙向充電; (B) V2G 可監控車輛狀態; (C) V2G 可將多餘的電力送回電網; (D) V2H 可計算電動車能量消耗管理
27. 電動車由多個部件組成,其中動力電池、動力電動機及高壓控制系統為電動車的三 大核心部件,有關高壓控制系統之敘述,下列何者正確? (A)可偵測電池溫度; (B)可控制電流大小; (C)保護元件不被高壓突波破壞; (D)為可控制電池高壓電輸入或輸出,確保整車用電安全
28. 車聯網(Vehicle-to-Everything, V2X)是將汽車和其他車輛或可能影響汽車裝置所進行 之通訊,從網路觀點來看,車聯網系統是一個端管雲三層體系,下列何者不屬於第 一層(端系統)內容? (A)安全認證; (B)車網通信; (C)智能感測器; (D)網路可信標識
29. 有關三相感應電動機速率控制之方法,不包含下列何者? (A)改變磁極數目; (B)改變外加電壓; (C)改變電源頻率; (D)並級控制
30. 有關三相交流發電機,其定子上有三組繞組互成幾度電機角? (A) 60°;(B) 90°;(C) 120°;(D) 180°
31. 電動車電機的恆定功率轉速比(Constant Power Speed Range, CPSR)是一個最重要評比指標,依據下表資訊比較 A~D 車款電機的 CPSR 恆定功率轉速比大小,下列何者正確? (A) A = D > C > B; (B) B > C > D = A; (C) C > B > D > A; (D) C > D > B> A
32. 有關電動車常用的感應電動機及永磁同步電動機之敘述,下列何者有誤? (A)永磁同步電動機效率高且耐高溫; (B)同功率下比較,感應電動機價格較永磁同步電動機低; (C)感應電動機構造簡單且可靠度高; (D)永磁同步電動機無轉子磁場繞組之銅損
33. 有關電動車常見電能轉換元件/模組所使用的功率元件,下列敘述何者有誤? (A) MOSFET 為電壓驅動的控制元件; (B) BJT 為電流驅動的控制元件; (C) IGBT 為電流驅動的控制元件; (D) SiC-MOSFET 為電壓驅動的控制元件
34. 有關三相感應電動機轉差率(s)之敘述,下列何者有誤? (A) 1>s> 0 時感應電動機為電動機模式; (B) s= 0 感應電動機會有轉子與定子相差 90 度; (C) s< 0 時感應電動機為煞車回充模式; (D) s> 0 時感應電動機為逆轉煞車模式
35. 若電動車採用下圖充電介面對車輛進行充電,當充電槍連接於車輛後,充電樁介面控制導引(Control Pilot, CP)訊號量測波形如圖所示,則該訊號代表下列何者意義? (A)告知車輛充電樁最大充電電流;(B)告知車輛需要進行數位通訊;(C)告知車輛 充電樁最大充功率;(D)錯誤狀態車輛不能進行充電
36. 某規格書定義,一個單晶片 RC 重置電路的理想時間常數範圍為 5~15ms,若該電 路預計使用 0.1μF SMD 電容,則下列何者正確? (A) 10Ω電阻;(B) 100Ω電阻;(C) 100kΩ電阻;(D) 1MΩ電阻
37. 下圖為車輛繼電器頭燈控制電路示意圖,下圖並聯於繼電器線圈端的 No.1 元件專用名稱為何? (A)整流二極體;(B)發光二極體;(C)稽納二極體;(D)飛輪二極體
38. 下圖為一個 12V 頭燈繼電器控制電路,12V 開關訊號(Switch Signal)輸入後會激磁常開繼電器線圈端,進而點亮頭燈,若下圖頭燈為開啟的狀態,No.1,2,3,4 點對地 (GND)電壓為多少伏特,下列選項何者有誤? (A) No.1 為 12V;(B) No.2 為 12V;(C) No.3 為 12V;(D) No.4 為 12V
39. 下圖為一介面開關(Switch)電路圖示意圖,若介面開關按下時開關導通,不按時開關斷路不導通,有關該電路設計下列敘述何者有誤? (A) OT1 元件稱為光耦器;(B)開關按下時 MCU_input 訊號約為 5V;(C) R2 電阻是 為確保開關未按下時,控制器(MCU)能偵測到 0V 訊號,故設計時電阻應越小越好;(D) R1 電阻在設計時,需考慮輸入電源電壓及 OT1 耐受電壓及電流
40. 一般使用三用電表 ACV 檔位,量測交流電訊號時,所得的數值即為有效值又稱均方根值電壓 Vrms,下圖電壓訊號之均方根值 Vrms 為多少伏特(V)? (A) √30 V;(B) 2√305V;(C) 0 V;(D) 2√6 V
41. 如下圖所示,若使 LED1、LED4、LED7 亮,其餘不亮,輸出資料暫存器(ODR: IC8BIT C1),下列設定何者正確? (A) ODR=49;(B) ODR=92;(C) ODR=0x92;(D) ODR=0x49
42. 電動車常使用 CAN Bus 作為通訊控制整合應用,有關 CAN Bus 通訊之敘述,下 列何者有誤? (A)屬於並列傳輸機制;(B)具有仲裁機制;(C)通訊速率可高達 1Mbps;(D)抗干擾 能力強
43. 電動車常使用 CAN Bus 進行訊號傳輸,其訊號線的末端皆會配置終端電阻,其主 要目的為何? (A)降低通信電纜中傳輸訊號的耗電流; (B)增強通信電纜中傳輸訊號的強度; (C)降低通信電纜中的信號反射; (D)增加通信電纜中傳輸訊號的電壓
44. 有關霍爾式輪速感測器,下列敘述何者有誤? (A)輪速越快則感測器輸出的波信號頻率越快; (B)感測器輸出信號電壓振幅值不受轉速的影響; (C)霍爾式輪速感測器抗電磁干擾能力強; (D)感測器輸出的信號波形為正負的數位方波
45. 有關電動車霍爾式加速踏板位置感測器,下列敘述何者有誤? (A)霍爾式加速踏板位置感測器上,一般採 6 個接線端子形式; (B)霍爾式加速踏板位置感測器中,有兩個霍爾感測元件; (C)霍爾式加速踏板位置感測器輸出為數位訊號; (D)霍爾式加速踏板位置感測器一般具備冗餘設計
46. 有關車輛防鎖死煞車系統(Anti-Lock Brake System, ABS)滑差率控制,下列敘述何 者正確? (A)一般滑差率會控制在 10~30%以達到最佳煞車控制; (B)滑差率為 0 表示車輪處於鎖死的狀態; (C)滑差率超過控制範圍以上時,會持續加壓煞車油壓,增大煞車壓力; (D)滑差率低於控制範圍以下時,會釋放煞車油壓使之回流減少煞車壓力
47. 一輛電動機車前輪採用浮動單向活塞式碟煞,其煞車分泵活塞總面積 80mm²,煞 車總泵活塞面積 40mm²,若總泵活塞受力 200N 作用時共推動 20mm 距離,將煞車 油隙及間隙忽略,其煞車分泵活塞位移距離及施加給煞車來令片力分別為多少? (A)分泵活塞位移距離 40mm,煞車來令片受力 200N; (B)分泵活塞位移距離 20mm,煞車來令片受力 200N; (C)分泵活塞位移距離 10mm,煞車來令片受力 400N; (D)分泵活塞位移距離 5mm,煞車來令片受力 800N
48. 有關車載導線之阻抗值與線徑之間的關係為何? (A)平方成反比;(B)反比;(C)平方成正比;(D)正比
49. SAE(美國汽車工程師協會)將自動駕駛等級區分為 0~5 級,下列何者為自動駕 駛等級 Level 3 之敘述? (A)屬於高度自動駕駛等級,條件允許下可以讓系統完全自動駕駛; (B)屬於有條件的自動駕駛,系統請求接管時駕駛人必須駕駛車輛,且系統具環境 辨識能力; (C)屬於部份自動駕駛,具方向盤轉動控制功能,例如:車道偏移維持、全速域主動 跟車等; (D)屬於駕駛輔助,具入門輔助駕駛功能,例如:車道偏移警示、自動緊急煞車等
50. 車用類比式訊號感測器在電路設計時,常應用運算放大電路,下列敘述何者正確? (A)運算放大電路僅用於將類比電壓訊號放大; (B)感測器的電壓訊號經運算放大後,一般落在 0~12V,並將放大訊號輸入至控制 器輸入單元; (C)類比式訊號感測器搭配運算放大電路,可供控制器輸入單元偵測到最佳類比訊 號之電壓範圍; (D)運算放大電路會增加設計成本,一般類比式訊號感測器若電壓輸出範圍很小, 通常會採用分壓式的電路設計
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A) A = D > C > B; (B) B > C > D = A; (C) C > B > D > A; (D) C > D > B> A
(A) A = D > C > B; (B) B > C > D = A; (C) C > B > D > A; (D) C > D > B> A (A)告知車輛充電樁最大充電電流;(B)告知車輛需要進行數位通訊;(C)告知車輛 充電樁最大充功率;(D)錯誤狀態車輛不能進行充電
(A)告知車輛充電樁最大充電電流;(B)告知車輛需要進行數位通訊;(C)告知車輛 充電樁最大充功率;(D)錯誤狀態車輛不能進行充電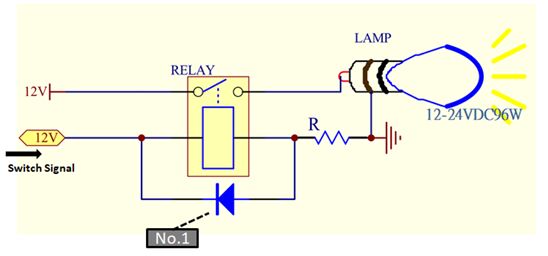 (A)整流二極體;(B)發光二極體;(C)稽納二極體;(D)飛輪二極體
(A)整流二極體;(B)發光二極體;(C)稽納二極體;(D)飛輪二極體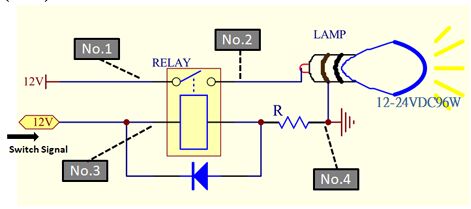 (A) No.1 為 12V;(B) No.2 為 12V;(C) No.3 為 12V;(D) No.4 為 12V
(A) No.1 為 12V;(B) No.2 為 12V;(C) No.3 為 12V;(D) No.4 為 12V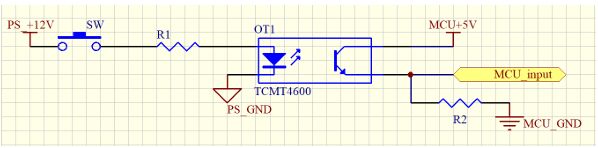 (A) OT1 元件稱為光耦器;(B)開關按下時 MCU_input 訊號約為 5V;(C) R2 電阻是 為確保開關未按下時,控制器(MCU)能偵測到 0V 訊號,故設計時電阻應越小越好;(D) R1 電阻在設計時,需考慮輸入電源電壓及 OT1 耐受電壓及電流
(A) OT1 元件稱為光耦器;(B)開關按下時 MCU_input 訊號約為 5V;(C) R2 電阻是 為確保開關未按下時,控制器(MCU)能偵測到 0V 訊號,故設計時電阻應越小越好;(D) R1 電阻在設計時,需考慮輸入電源電壓及 OT1 耐受電壓及電流 (A) √30 V;(B) 2√305V;(C) 0 V;(D) 2√6 V
(A) √30 V;(B) 2√305V;(C) 0 V;(D) 2√6 V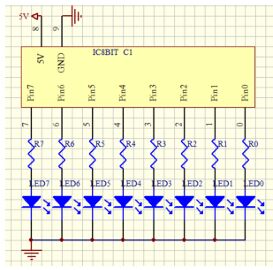 (A) ODR=49;(B) ODR=92;(C) ODR=0x92;(D) ODR=0x49
(A) ODR=49;(B) ODR=92;(C) ODR=0x92;(D) ODR=0x49