阿摩線上測驗
登入
首頁
>
高中技藝◆機器手臂
>
114年 - 114 全國高級中等學校學生技藝競賽考試_工業類:機器手臂#137909
> 試題詳解
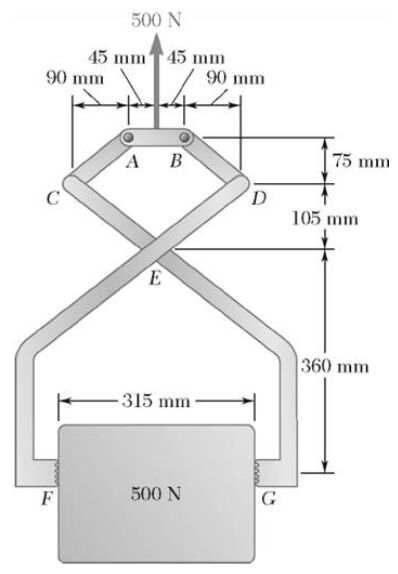
27.如圖之夾爪,靜摩擦係數至少需為多少才可夾起物件?
(A)0.81
(B)0.86
(C)0.91
(D)0.96。
答案:
登入後查看
統計:
尚無統計資料
相關試題
28.以下敘述何者有誤? (A)對於物件具有不同大小的表面時,夾爪必須握住物件較大的表面,將有助於夾持的穩定性與物件的定位控制 (B)精確估計夾持物件所需的夾持是非常容易的(C)電磁式夾爪比永磁式夾爪容易控制 (D)計算機械夾爪所需之夾持力時,需要考慮夾爪與物件表面間的摩擦係數。
#3835908
29.下述有關夾爪的敘述,何者有誤? (A)在大部分的用途上,機械式平行夾爪比其它型式夾爪更為精確 (B)工作完成時,電磁式夾爪需要一個移除機構或工具將物件釋放 (C)氣壓驅動式夾爪具有成本低廉、重量輕及容易使用等優點 (D)當要夾取複雜形狀的物件時,三顎夾爪比兩顎夾爪更為適用。
#3835909
30.標準夾爪通常具有兩種型式夾緊動作,支點式(angular)、平行式(parallel),而驅動其動作的方法,除了用電力馬達驅動外還可以用何種方法? (A)氣體壓力 (B)液體壓力 (C)彈簧力 (D)以上皆是。
#3835910
31.壓電感測器具有燒製方便、易成型、耐濕、耐高溫,但卻會有熱釋電性,導致力學量測有所干擾的是? (A)壓電石英感測器 (B)壓電陶瓷感測器 (C)壓電有機感測器 (D)壓電無機感測器。
#3835911
32.考慮空間中六個自由度的運動:假設我們要使用一個以「點接觸」且其和物件表面間「無 摩擦力」的夾爪來操作立方體物件,若希望物件能穩定的跟隨夾爪的移動和轉動,則夾爪上 需至少和物件間有幾個接觸點? (A)2 (B)3 (C)4 (D)5 個。
#3835912
33.考慮空間中六個自由度的運動:假設夾爪上某指頭和物件間為「具有摩擦力的軟性小接觸面」(如人手上的指頭一般),此接觸面能對物件產生移動和轉動運動自由度的限制為:(A)移動 1 個,轉動 1 個 (B)移動 2 個,轉動 1 個 (C)移動 3 個,轉動 1 個 (D)移動 3 個, 轉動 3 個。
#3835913
34.如圖兩指夾具為例,F 為夾持力,W 為物體重量,μ 為夾指與物體間的摩擦係數,假設μ=0.1,安全係數為 4,請問夾持力至少要物體重量幾倍以上? (A)5 (B)10 (C)15 (D)20。
#3835914
35.工業機器人操作區域可分為(Ⅰ)最大操作範圍;(Ⅱ)限制區域範圍;(Ⅲ)正在作業操作範圍,一般工業機器人在運作時,勞工可以進入之區域為 (A)Ⅰ (B)Ⅱ (C)Ⅲ (D)以上皆非。
#3835915
36.機器人各類風險考量哪項不正確? (A)應先行以設計或替代方式消除或降低 (B)以安全防護或其他補充措施為之 (C)任何殘留風險則應考量以其他措施降低如警告,標示及訓練(D)操作者小心就不會有風險。
#3835916
37.起動機器人前,應先確認事項中何者不在危害預防標準內? (A)在可動範圍內無任何人存在 (B)移動式控制面盤、工具等均已置於規定位置 (C)機器人或關連機器之異常指示燈等均未顯示有異常 (D)機器人能否啟動。
#3835917
相關試卷
114年 - 114 全國高級中等學校學生技藝競賽考試_工業類:機器手臂#137909
2025 年 · #137909
113年 - 113 全國高級中等學校學生技藝競賽考試_工業類:機器手臂#138087
2024 年 · #138087
112年 - 112 全國高級中等學校學生技藝競賽考試_工業類:機器手臂#138186
2023 年 · #138186
 阿摩線上測驗
登入
阿摩線上測驗
登入
阿摩線上測驗
登入
阿摩線上測驗
登入