所屬科目:高中技藝◆機器手臂
1. 多軸關節式機器人(機器手臂)的特點是高自由度與靈活性,常應用於物件的搬運,如取放與堆疊或複雜的加工、零組件的組裝或是工件去毛邊;並聯式機器人(Delta Robot)的特點是工作範圍僅限於手臂末端附近的圓柱狀區域與運作速度快,精度高且累積誤差小,工業上常搭配視覺系統來運作。試問下列何者適合以並聯式機器人來開發? (A)汽車板金噴漆 (B)食品自動化整列 (C)手機外殼去毛邊及拋光 (D)汽車底盤焊接 。
2. 考量強度有些機器人的機體材質使用金屬構成,就會有重量的問題,如要讓機器人運動,馬達的選配就很重要。試問下列哪一項是挑選馬達的主要因素? (A)精度 (B)功耗 (C)體積 (D)扭力 。
3. 定位精度為機器人控制系統能夠分辨出差異的最小工作空間位置控制增量變化。機器人的定位精度與下列何者沒有直接的關係? (A)伺服控制器 (B)機械構造及材料特性 (C)位置感測器 (D)機器人程式語言 。
4. 令L代表直線平移以及R代表旋轉關節,3軸SCARA機械臂之運動自由度為下列何者機械結構? (A)L3 (B)L2R (C)LR2 (D)R3 。
5. 下列何者不是關節型機器手臂的優點? (A)最佳的剛性與定位精度 (B)最大的工作空間與佔用空間比 (C)適用的搬運負荷與機器人重量之比值 (D)安裝方式最多元,可置於檯面、吊掛、壁掛 。
6. 以下何者正確? (A)腕中心與機器人第一軸線的距離是機器人最大可達半徑 (B)最後一軸法蘭面(Flange)中心與機器人第一軸線的距離是機器人最大可達半徑 (C)因為安全緣故,機器人工作空間不會低於機器人的底座平面 (D)以上皆錯 。
7. 請問工業機器人規格中不一定有的項目是? (A)荷重 (B)位置重複精度 (C)功用 (D)關節最大速率 。
8. 機器人與攝影機整合運作,下列哪一項正確? (A)攝影機客安裝於機器人終端效應器上 (B)攝影機可安裝於機器人外部 (C)攝影機可安裝於機器人手臂上 (D)以上皆是 。
9. 下列何者不是移動式機器人? (A)導覽機器人 (B)運用肌電訊號啟動的動力外骨骼裝置 (C)老人行動輔助器 (D)機器化士兵機器人 。
10. 下列何者不是輪型移動平台使用的外部感測器? (A)雷射掃描器 (B)編碼器 (C)超音波感測器 (D)CCD或CMOS立體視覺系統 。
11. 機器人危害之主要原因不包括? (A)外物入侵 (B)人為疏失 (C)設計不良 (D)以上皆是 。
12. 已知某一機械手臂的某一軸所需之扭力為14.7N.m,並且減速機減速比為360,請問該軸之額定扭矩至少應約有多少?(單位:mNm) (A)24 (B)41 (C)52 (D)14.7 。
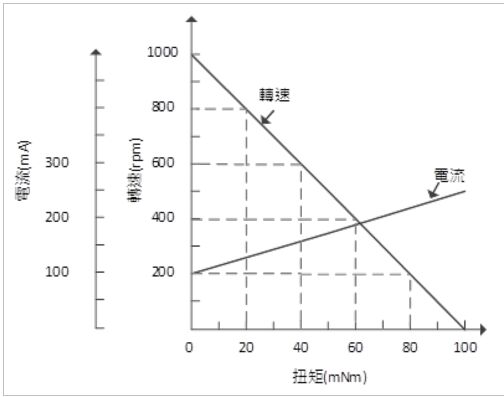
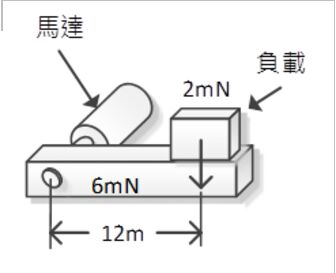
13. 如圖(a)所示為一個永磁(PM)馬達的扭矩轉速曲線,圖(b)所示,該馬達連接於一個長12m的機器手臂上,並且手臂末端有一個負載,其所形成的力為2mN,假設手臂為一個均勻分布的剛體,其重量集中於手臂的重心位置上,而手臂重量所形成的力是6mN,則該馬達轉速應為?
(A)200 (B)400 (C)600 (D)1000 rpm 。
14. 馬達工作時,常希望定子磁場 (A)領先轉子磁場90度 (B)落後轉子磁場90度 (C)與轉子磁場重合 (D)領先轉子磁場180度 。
15. 在伺服馬達的脈波指令的位置控制中,下面哪一種不屬於通用的脈波指令? (A)脈波/方向 (B)CW/CCW脈波列 (C)階梯型脈波列 (D)A/B相脈波列 。
16. 在進行滾珠螺桿的傳動機構的馬達選配時,若M代表工作物的質量,代表螺桿導程,代表螺桿的轉動慣量,則傳動機構的等效慣量為 (A) (B) (C) (D) 。
17. 有關RS-485的敘述,下列何者為正確? (A)資料傳輸速度較RS-232慢 (B)是一對一通訊的規格 (C)對抗雜訊較RS-232弱 (D)網路傳輸距離較RS-232強 。
18. 在裝設馬達時常會與軸承搭配使用,下列有關於軸承的用途何者是錯誤的? (A)增加傳動效率 (B)增大轉子的轉動慣量 (C)減低轉軸摩擦 (D)保持軸的軸心位置 。
19. 關於伺服馬達具備的特點,下列何者是正確的? (A)越接近零轉速,轉矩會越小 (B)轉子的慣性大,啟動的轉矩小 (C)伺服機轉動時在任何角度的定位精度都相同 (D)在輸入電壓為零時,不會發生自轉的的狀況 。
20. 下列對步進馬達的敘述,何者不正確? (A)步進馬達在低速(<1000rpm)可維持較高扭矩,隨著轉速提高,扭矩會隨之下降 (B)一般而言,相數越高表示基本步進角越小,控制的精準度也就越高 (C)混合型步進馬達結合了PM和VR步進馬達的特性,電源關掉便無激磁保持扭矩 (D)VR馬達可以達到非常小的步進角(小於1°),因此它可以作為更精確的定位 。
21. 輪型機器人使用直流馬達驅動,如果需要降低轉速及改變扭力,應選用 (A)差速器 (B)減速齒輪組 (C)旋轉編碼器 (D)位移感測器 。
22. 4位元之D/A轉換器,若輸入11002時輸出電壓為4V,若要輸出電壓為2V時,其輸入信號為何? (A)10012 (B)11102 (C)01012 (D)01102 。
23. 今有一個伺服馬達之額定最大轉矩為1.4kg-cm,如果要提供14kg-cm之轉矩輸出以驅動負載 則應: (A)將外加電壓提高10倍 (B)串接變壓器提高電壓 (C)串接10顆伺服馬達 (D)接一個10:1之變速齒輪箱 。
24. 在使用對雜訊敏感的控制器時,通常會加入何種濾波器以降低雜訊? (A)低通濾波器 (B)帶通濾波器 (C)高通濾波器 (D)以上皆可 。
25. 機器人定位控制中,有效消除穩態誤差的方式為 (A)提高微分控制(Derivative contol)的增益 (B)採用積分(Integral control)控制 (C)增加致動器的功率 (D)以上皆可 。
26. 機器人系統可能的電氣危害,下列何者為非? (A)系統內不同電壓之混淆 (B)使用於高壓焊接應用 (C)末端作用器非預期性的移動 (D)暴露於電弧閃光中 。
27. 機器人定位控制中若是以位置誤差回授來調節馬達扭力,相當於提供機器人的伺服 (A)慣性 (B)阻尼 (C)剛性 (D)功率 。
28. 工業機器人使用交流伺服馬達驅動各軸做點對點運動,驅動器需設定為何種模式? (A)位置模式 (B)速度模式 (C)扭力模式 (D)寸動模式 。
29. 以下敘述何者有誤? (A)齒輪傳動系統可依運轉需要做加速或減速 (B)齒輪傳動系統運轉圓滑,所以震動小 (C)齒輪傳動系統的優點之一是可以傳遞較高的動力 (D)蝸桿蝸輪傳動系統可以傳遞較高的動力並具有高效率,但不得用於高減速比 。
30. 以下敘述何者有誤? (A)皮帶傳動系統之較小皮帶槽輪的接觸角應大於120° (B)應確保皮帶槽輪承載軸保持平行,使皮帶能平穩地與槽輪配合 (C)使用多條皮帶同時傳動,各皮帶長度應儘量一致 (D)以雙條皮帶傳動時,其傳遞動力為單條皮帶的兩倍 。
31. 設有一鏈條之有效張力為1200N,平均速度為75m/min,則其傳動功率為 (A)1000 (B)1500 (C)2000 (D)2500 W 。
32. 減速機根據傳動方式大致可分為正齒輪式、傘齒輪、蝸輪蝸桿組與諧和式減速機,下列關於「諧和式減速機」功能和優缺點描素何者為非? (A)高轉速比,可高達1/320的高速減速比裝置 (B)相較其他減速機,背隙小、精度高 (C)基本組件少、體積小、重量輕,比其他減速機便宜 (D)扭力大且運轉安靜 。
33. 致動器(actuator)可以使機器人、機械等運動;將電力、空氣壓力、油壓等能量來源轉換為機械的旋轉運動、往復運動、搖擺運動等的零件。請問下列哪一個致動器會造成搖擺運動? (A)步進馬達 (B)氣壓缸 (C)搖擺式致動器 (D)形狀記憶合金 。
34. 下列何者不是附齒皮帶相較於鏈條的優點? (A)適合高轉速 (B)不需要潤滑油 (C)噪音少 (D)初期張力小 。
35. 圖中所示為機器人上常用的諧波減速機(Harmonic drive)的概念圖,具有三個元件。在一般減速的使用方式中,哪一個元件為和致動器相連的輸入端?
(A)最內側元件 (B)中間元件 (C)外側元件 (D)都可以,視減速狀況而定 。
36. 行星齒輪系統(planetary gear train)為常用的減速系統之一,假設太陽齒輪(sun gear)為15齒,行星齒輪(planet gear)為45齒,齒圈(annulus gear)為105齒。假設太陽齒輪為輸入端,行星架(carrier)為輸出端,齒圈固定不動,則此齒輪系統的減速比為 (A)3:1 (B)7:1 (C)8:1 (D)10:1 。
37. 考慮摩擦力的情況下,夾爪至少需要多少支手指才能穩定夾取三維物體?_______支 。 (A)2 (B)3 (C)4 (D)5
38. 如圖之夾爪機構,夾持力為多少?_______ kN 。
(A)5.45 (B)6.45 (C)7.45 (D)8.45
39. 以下敘述何者有誤? (A)夾持物件的表面必須是可適當觸及的 (B)夾持力量大小必須考慮物件尺寸的改變 (C)夾持物件造成尺寸的改變不會影響物件位置的精確度 (D)設計夾爪與物件的接觸面時,應考量物件表面的性質 。
40. 下列何者為電力式夾爪優點? (A)精密度高 (B)動力大 (C)高速度 (D)成本低 。
41. 近代機器人的手臂端效器需配合合適工具以進行各種不同應用,下列何項非該夾持工具之設計時需考慮之主要因素? (A)夾爪夾持工件的方法 (B)欲夾持工件之幾何外觀與尺寸 (C)夾爪的功能 (D)流線型與風阻 。
42. 下列何者不是安全檢知系統? (A)移載檢知 (B)感應光閘 (C)自動光學檢查機台(AOI) (D)智慧門扣 。
43. 當人員進入在安全圍籬內,何者爲優先採取的措施? (A)停止手臂運行(B)告知人員如何閃過手臂動作 (C)找人陪同進入 (D)限制進入的時間 。
44. 下列工具(TOOL)座標系功用為何者? (A)移動位置使用(B)根據真實末端工具,平移與旋轉至真實TCP點使用 (C)切換到料盤的使用者指定位置(D)無功用,不需設定 。
45. 造成6軸垂直多關節型機械手臂,程式的直線動作從靜止時起動的瞬間,或者從直線動作靜止的瞬間,末端效應器或TCP有輕微震動現象的原因,下列何者最合理?(A)程式點位教導不準確 (B)負載(payload)設定與實際物件有差異或沒有設定,使6個馬達加速度難以協調 (C)風力等外部因素造成 (D)機器上沒有放乖乖 。
46. 已經編寫完成的機械手臂程式,點位都教導好了,也測試過沒問題,在生產線上持續動作了幾個月,沒有發生過撞機或重大異常。突然發生位置偏差,放置工件到治具X時一直撞到同一個角,但另一個治具Y的取出位置沒問題。最有可能造成此問題的原因是:(A)機器手臂(包含底座)的位置沒固定好,產生移動 (B)夾爪因為某種原因被撞歪了 (C)機器手臂的馬達故障 (D)治具X位置可能被移動過了 。
47. 大部分的情況,大型機械手臂比小型機械手臂:(A)重複位置精度略差,絕對精度也略差 (B)作業半徑小 (C)便宜很多 (D)重量輕所以更安全 。
48. 若垂直關節6軸機器手臂其中1軸伺服馬達故障,更換新馬達後,單軸零度校正不夠精準的話,以「實機位置教導(teaching)」的方式來說,有可能出現以下哪種情形?(A)直線移動時產生偏差 (B)比故障之前更精準 (C)外部I/O信號產生問題 (D)比以前耗電 。
49. 機械手臂提升軌跡精度的方式,以下何者為誤?(A)選擇高精度的機械手臂 (B)加快速度 (C)以更精確的方式教導位置 (D)以視覺等感測器輔助 。
50. 有關延長機械手臂的使用壽命,以下何者為誤?(A)謹慎使用,減少撞機 (B)按原廠手冊說明,定時保養 (C)在該機種的規格內安裝適合重量的末端效應器(夾爪等) (D)減少電壓到原本的80%,以免燒壞 。
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)200 (B)400 (C)600 (D)1000 rpm 。
(A)200 (B)400 (C)600 (D)1000 rpm 。 代表螺桿導程,
代表螺桿導程, 代表螺桿的轉動慣量,則傳動機構的等效慣量為 (A)
代表螺桿的轉動慣量,則傳動機構的等效慣量為 (A)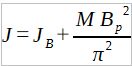 (B)
(B)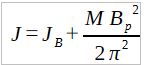 (C)
(C) (D)
(D) 。
。 (A)最內側元件 (B)中間元件 (C)外側元件 (D)都可以,視減速狀況而定 。
(A)最內側元件 (B)中間元件 (C)外側元件 (D)都可以,視減速狀況而定 。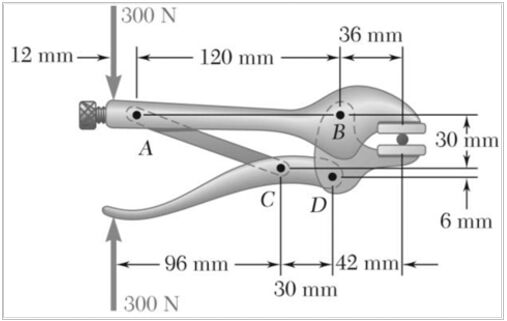 (A)5.45 (B)6.45 (C)7.45 (D)8.45
(A)5.45 (B)6.45 (C)7.45 (D)8.45