阿摩線上測驗
登入
首頁
>
高中技藝◆機器手臂
>
113年 - 113 全國高級中等學校學生技藝競賽考試_工業類:機器手臂#138087
> 試題詳解
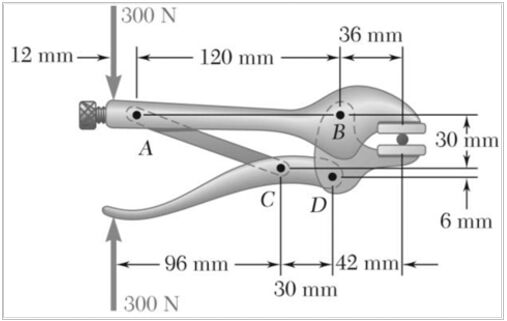
38. 如圖之夾爪機構,夾持力為多少?_______ kN 。
(A)5.45
(B)6.45
(C)7.45
(D)8.45
答案:
登入後查看
統計:
尚無統計資料
相關試題
39. 以下敘述何者有誤? (A)夾持物件的表面必須是可適當觸及的 (B)夾持力量大小必須考慮物件尺寸的改變 (C)夾持物件造成尺寸的改變不會影響物件位置的精確度 (D)設計夾爪與物件的接觸面時,應考量物件表面的性質 。
#3842151
40. 下列何者為電力式夾爪優點? (A)精密度高 (B)動力大 (C)高速度 (D)成本低 。
#3842152
41. 近代機器人的手臂端效器需配合合適工具以進行各種不同應用,下列何項非該夾持工具之設計時需考慮之主要因素? (A)夾爪夾持工件的方法 (B)欲夾持工件之幾何外觀與尺寸 (C)夾爪的功能 (D)流線型與風阻 。
#3842153
42. 下列何者不是安全檢知系統? (A)移載檢知 (B)感應光閘 (C)自動光學檢查機台(AOI) (D)智慧門扣 。
#3842154
43. 當人員進入在安全圍籬內,何者爲優先採取的措施? (A)停止手臂運行(B)告知人員如何閃過手臂動作 (C)找人陪同進入 (D)限制進入的時間 。
#3842155
44. 下列工具(TOOL)座標系功用為何者? (A)移動位置使用(B)根據真實末端工具,平移與旋轉至真實TCP點使用 (C)切換到料盤的使用者指定位置(D)無功用,不需設定 。
#3842156
45. 造成6軸垂直多關節型機械手臂,程式的直線動作從靜止時起動的瞬間,或者從直線動作靜止的瞬間,末端效應器或TCP有輕微震動現象的原因,下列何者最合理?(A)程式點位教導不準確 (B)負載(payload)設定與實際物件有差異或沒有設定,使6個馬達加速度難以協調 (C)風力等外部因素造成 (D)機器上沒有放乖乖 。
#3842157
46. 已經編寫完成的機械手臂程式,點位都教導好了,也測試過沒問題,在生產線上持續動作了幾個月,沒有發生過撞機或重大異常。突然發生位置偏差,放置工件到治具X時一直撞到同一個角,但另一個治具Y的取出位置沒問題。最有可能造成此問題的原因是:(A)機器手臂(包含底座)的位置沒固定好,產生移動 (B)夾爪因為某種原因被撞歪了 (C)機器手臂的馬達故障 (D)治具X位置可能被移動過了 。
#3842158
47. 大部分的情況,大型機械手臂比小型機械手臂:(A)重複位置精度略差,絕對精度也略差 (B)作業半徑小 (C)便宜很多 (D)重量輕所以更安全 。
#3842159
48. 若垂直關節6軸機器手臂其中1軸伺服馬達故障,更換新馬達後,單軸零度校正不夠精準的話,以「實機位置教導(teaching)」的方式來說,有可能出現以下哪種情形?(A)直線移動時產生偏差 (B)比故障之前更精準 (C)外部I/O信號產生問題 (D)比以前耗電 。
#3842160
相關試卷
114年 - 114 全國高級中等學校學生技藝競賽考試_工業類:機器手臂#137909
2025 年 · #137909
113年 - 113 全國高級中等學校學生技藝競賽考試_工業類:機器手臂#138087
2024 年 · #138087
112年 - 112 全國高級中等學校學生技藝競賽考試_工業類:機器手臂#138186
2023 年 · #138186
 阿摩線上測驗
登入
阿摩線上測驗
登入
阿摩線上測驗
登入
阿摩線上測驗
登入