 阿摩線上測驗
阿摩線上測驗
題組內容
四、考慮一倒立單擺,如下圖所示: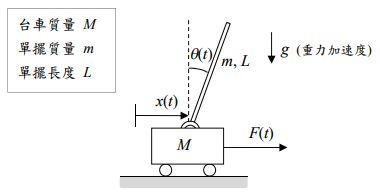
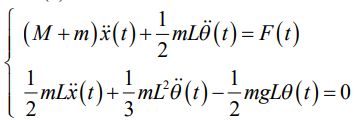
為了利用外力F(t)將此倒立單擺控制在垂直角度θ(t)=0通常將此動 態方程式簡化為下列之微分方程式: , 其中輸入為F( t)各常數係數 a1 、 a 2、b可由M 、m、L、g 來表示。
, 其中輸入為F( t)各常數係數 a1 、 a 2、b可由M 、m、L、g 來表示。
, 其中輸入為F( t)各常數係數 a1 、 a 2、b可由M 、m、L、g 來表示。(三)為了控制單擺至垂直角度 θ( t)= 0 ,設計  來達到控制目標,若受控後之系統穩定特徵根為α 與β。請利用 a1 、 a2 、 b 、 α 、 β 來表示 k1 與 k2 。
來達到控制目標,若受控後之系統穩定特徵根為α 與β。請利用 a1 、 a2 、 b 、 α 、 β 來表示 k1 與 k2 。