阿摩線上測驗
登入
首頁
>
農業機電與控制
>
103年 - 103 高等考試_三級_農業機械:農業機電與控制#43144
> 申論題
題組內容
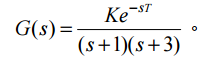
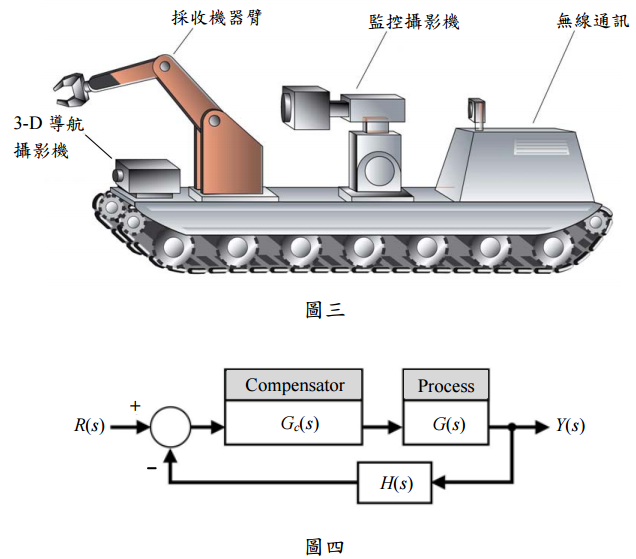
六、一新研發之機器人採果系統(圖三)之開迴路函數為:(每小題 10 分,共 20 分)
⑴當 T = 0.5 秒時,請配置適當之 K 值,使系統之步階響應之超行量(overshoot) 小於 30%並求其穩態誤差。
相關申論題
一、現行都市更新條例中有關「權利變換」制度之精神為何?司法院釋字第 709 號解釋 對現行都市更新法制指摘違憲之主要內容為何?試申述之。(25 分)
#138081
二、非都市土地開發辦理土地變更編定時,興辦事業計畫不得位於區域計畫規定之限制 發展地區,惟有那些情形不受限制?請依規定說明之。(25 分)
#138082
三、區段徵收範圍內土地,經規劃整理後,其處理方式為何?以區段徵收方式取得用地, 社會上普遍指摘欠缺「公共利益」,其問題何在?試申論之。(25 分)
#138083
四、為促進都市計畫公共設施用地之取得與開發,對於鼓勵私人或團體取得公共設施用 地之作法為何?試申述之。(25 分)
#138084
一、近十餘年來臺灣積極推動終身學習,相關法令、政策陸續制定,各類學習機構、組 織也蓬勃發展。然整體而言,仍存在一些問題有待解決。請問當前臺灣終身學習之 推展還存在那些主要問題?為全面開展終身學習,奠定學習社會之良好基礎,應有 那些策略可用以解決當前問題?請申論之。(25 分)
#138085
二、社會教育機構以各種教育方案實踐其教育目標,因此社會教育方案規劃是相當重要 的。方案規劃是一個繼續不斷作決定的過程,在規劃過程中會牽涉到規劃者、組織 贊助者及參與者之間的合作與互動。請以系統分析的觀點,詳細分析社會教育方案 發展中,相互關連循環互動的次系統及其重點工作為何?請運用博物館推廣教育為 例輔助說明。(25 分)
#138086
三、新博物館概念強調與社區之互動學習,唯有兩者相互扶持,才能相輔相成,促進個 人與區域之發展。請問博物館與社區有那些面向的關係?而地方博物館在運作社區 學習工作上之 SWOT 為何?地方博物館推展社區學習之重要工作為何?(25 分)
#138087
四、從博物館學習的觀點,成人學習者有那些特質與兒童是不同的?又成人參與學習的 動機有那些?而參與博物館學習最大的障礙為何?(25 分)
#138088
一、參照國際博物館協會(ICOM)所訂定章程,試論博物館之定義及其在當代社會的 功能與核心價值。(25 分)
#138089
二、請舉例並說明:博物館如何保存維護、展示有形與無形文化資產。(25 分)
#138090
相關試卷
114年 - 114 高等考試_三級_農業機械:農業機電與控制#128767
114年 · #128767
113年 - 113 高等考試_三級_農業機械:農業機電與控制#121341
113年 · #121341
112年 - 112 高等考試_三級_農業機械:農業機電與控制#115668
112年 · #115668
110年 - 110 高等考試_三級_農業機械:農業機電與控制#102804
110年 · #102804
109年 - 109 高等考試_三級_農業機械:農業機電與控制#88746
109年 · #88746
108年 - 108 高等考試_三級_農業機械:農業機電與控制#77750
108年 · #77750
107年 - 107 高等考試_三級_農業機械:農業機電與控制#70717
107年 · #70717
104年 - 104 高等考試_三級_農業機械:農業機電與控制#42649
104年 · #42649
103年 - 103 高等考試_三級_農業機械:農業機電與控制#43144
103年 · #43144
100年 - 100 高等考試_三級_農業機械:農業機電與控制#45671
100年 · #45671
 阿摩線上測驗
登入
阿摩線上測驗
登入