所屬科目:教甄◆生活科技專業
1.使用 CNC 加工時,下列有關切削的敘述,何者為正確? (A)進刀量愈大,切削力愈小 (B)切削延展性高之材料,切削性最佳 (C)切削速率對切削力的影響比切削深度大 (D)加切削劑可略減切削力
2. 左圖之前視圖為 (A)(B)(C)(D)
3.一直流電路如下圖所示,其中 R 為色碼電阻,則電流 I 不可能為多少毫安培(mA)?(A)9.5 (B)10.0 (C)10.5 (D)11.5
4.在純半導體中加入雜質原子的過程稱為? (A)摻雜 (B)鍵結 (C)晶格化 (D)純化
5.二極體在順向偏壓時,下列敘述何者正確? (A)有大電阻 (B)有大電壓降 (C)截止電流 (D)導通電流
6.舊金山金門大橋的結構安全,下列敘述何者不正確? (A)缺點為撓度和振動較其他橋梁結構幅度大 (B)吊橋一般具有用料省、自重輕的特點 (C)吊橋的懸索是主要承受拉力之構件 (D)吊橋的跨徑比其他形式橋梁相跨距小
7.請問各種機構與現實生活的對應,何者正確? (A)曲柄搖桿/冰箱之門開合 (B)雙曲柄搖桿/蒸汽火車 (C)撓性傳動機構/汽車傳動結構 (D)雙搖桿/插床之急回機構
8.將規格為 50V/25W 與 200V/400W 之燈泡串聯,接於 100V 電源時,下列何者正確? (A)25W 燈泡燒壞 (B)400W 燈泡消耗功率較高 (C)兩燈泡消耗功率一樣 (D)兩燈泡都不亮。
9.某電阻器色碼為棕、黑、橙、金,則該電阻器可能之最大電阻值為 (A)9500Ω (B)10000Ω (C)10500Ω (D)11000Ω。
10.輪型機器人在進行迷宮競走賽時,如果迷宮是全黑的環境,可使用下列那一種元件來探測牆面較穩 定?(A)光敏電阻 (B)觸鬚型微動開關 (C)紅外線感測器 (D)光電晶體
11.某位學生在設計自走機器人時,使用四連桿機構讓機器人的前臂能上下擺動。若想讓機構輸出 端來回擺動而非連續旋轉,應將哪一根桿件設計為最短? (A)曲柄(輸入桿)(B)搖桿(輸出桿) (C)連桿(中間桿)(D)機架(固定桿)
12.補強工法中,最適合「提升整體剪力與剛性」的是? (A)擴柱補強 (B)翼牆補強 (C)減震器補強 (D)剪力牆補強
13.請判斷下列結構元件與其主要承受之應力配對何者最恰當? (A)樑-剪力(B)桿件-彎矩(C)柱-軸力與彎矩(D)桁架-扭力與拉力
14.P 波與 S 波幾乎同時抵達時,對建築結構的影響為何?(A)結構因上下、左右共震而產生複合受 力(B)建築物可提前感知 P 波進行避難(C)地震能量釋放較小,損害有限(D)P 波可抵銷 S 波造成 的剪力破壞
15.如下圖,使用折合鋸鋸切木材時,其施力方式何者正確? (A)推出時用力,拉回時放輕 (B)拉回時用力,推出時放輕 (C)推出、拉回都應均勻用力 (D)任何施力方式都可以
16.工程設計流程有許多步驟,其中「將大量資料進行分類,經由整理、分析或統計後;再藉由團 隊分組腦力激盪、排列組合的過程,並提出多個具體可用的解決方法」是屬於下列哪一個步驟? (A) 界定問題 (B) 預測分析 (C) 發展方案 (D) 測試修正。
17.有關電子零件的運作方式,下列何者有誤?(A) 極限開關主要控制工作機械的位置,通常放在 運動方向的兩個極端,避免撞機。 (B) 全波整流電路,需要透過 4 個二極體,搭配二極體電流 的方向性,來達成整流的目的。 (C) 光敏電阻器,在照光時電阻值會下降。 (D)繼電器的應用 可以透過大電流控制小電流。
18.下列何者是人工智慧影像辨識技術中的前處理(Preprocessing)主要目的?(A)把影像中的目標 物從原影像中獨立出來 (B)擷取設備取得數位影像(C)目標物辨識 (D)強化影像特徵,使影像更適合後續
19.有關自行車的零件與機構的敘述,下列何者正確? (A) 軸承屬於傳動機件 (B) 車架屬於連結機件 (C) 煞車塊屬於固定機件(D) 整台自行車稱為機械
20.自行車使用的鏈條節距為 1.3 cm,鏈輪中心距為 44 cm,前後鏈輪齒數分別為 38 齒與 19 齒, 則使用的鏈條長度最短約為多少 cm? (A)75.4 (B)127.4 (C)148.2 (D)162.5
1.依訓練資料、產出判別的過程與結果不同,機器學習大致上可以分為三類: 監督式學習 (Supervised Learning)、非監督式學習 (Unsupervised Learing)與增強式學習 (Reinforcement Learning),請說明上述三類差異處。
(1)請解釋為何會產生此現象?
(2)阿華需如何改善才能讓小車在地面上跑?
3.請說明 PWM(Pulse Width Modulation)訊號在控制馬達時的原理與實務應用,並舉例說明如何使用 analogWrite()指令控制馬達速度。
三、繪圖題1.請繪製下方三視圖之等角圖(比例自訂)
2.請設計一個簡易的直流線控車電控迴路,驅動器為一 5V 之減速馬達,由一個選擇(單切)開關與 2 個按鈕 開關來控制系統之啟動與車子之前進與後退,當選擇開關右切時,系統啟動,綠色 LED 燈亮,按住按鈕 開關 A,車子前進,按住按鈕開關 B,車子後退;當選擇開關左切時,系統停止,綠色 LED 燈滅,按住 A 按鈕或 B 按鈕皆無任何效果。
四、計算題1.有一零件目前需透過逆向工程方式,進行 3D 建模,該生使用游標卡尺的精度為 0.02m;下圖為目前主尺與副尺刻劃對齊之位置,請計算出該零件目前量測到尺寸為多少 mm?
2.一對相互嚙合的外接正齒輪,齒輪模數為 5,主動輪齒數為 20 齒,從動輪轉速為 100rpm。 若兩齒輪轉軸中心距為 200mm, 則主動輪轉速為多少 rpm?
五、申論題 生活科技教師預計於下學期開設一門工程學類加深加廣實作課程,因應 ChatGPT 和大型語言模型技術的崛起,請規劃該課程核心素養、教學進度表、活動評量標準、並可結合數位精進計畫四學精神(學生自學、 組內共學、組間互學及教師導學)
 阿摩線上測驗
登入
阿摩線上測驗
登入
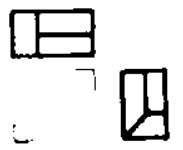 左圖之前視圖為 (A)
左圖之前視圖為 (A) (B)
(B) (C)
(C) (D)
(D)
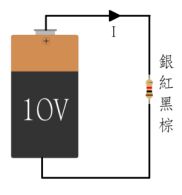 (A)9.5 (B)10.0 (C)10.5 (D)11.5
(A)9.5 (B)10.0 (C)10.5 (D)11.5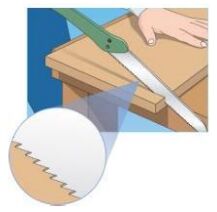 (A)推出時用力,拉回時放輕 (B)拉回時用力,推出時放輕 (C)推出、拉回都應均勻用力 (D)任何施力方式都可以
(A)推出時用力,拉回時放輕 (B)拉回時用力,推出時放輕 (C)推出、拉回都應均勻用力 (D)任何施力方式都可以
