阿摩線上測驗
阿摩線上測驗
題組內容
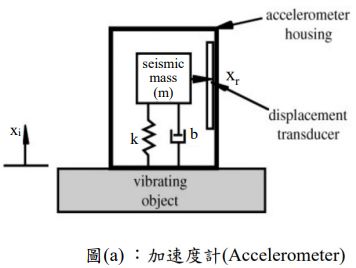
五、圖(a)為裝置於曳引機上之加速度計(Accelerometer),此系統之運動
方程式為 其中 m 為其質量、b 為阻尼係數(Damping coefficient),k 為其彈簧
常數(Spring constant)
其中 m 為其質量、b 為阻尼係數(Damping coefficient),k 為其彈簧
常數(Spring constant)
若輸入信號為 xi (t) = Xi sin(ωt)
其中 xr(t)為質塊(Mass)與外殼(Housing)的相對位移,ω 為振動
頻率,而在此線性系統中,xr(t)=Xrsin(ωt+Φ),其中Φ為相位角,ωn 為
系統之自然頻率(Natural frequency),ς 為阻尼比(Damping ratio)。
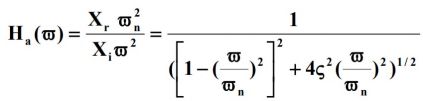
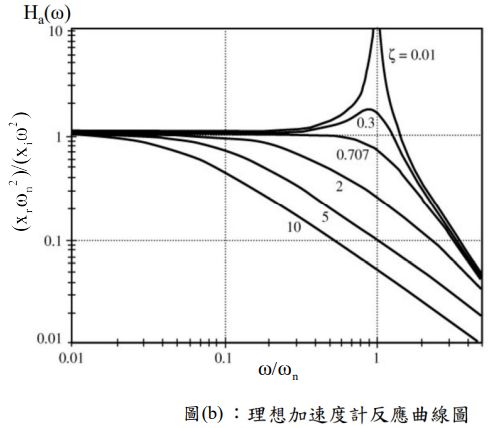
經過一番導證得到輸出與輸入之關係式如下: