 阿摩線上測驗
阿摩線上測驗
題組內容
5. Consider a second order system G(s) (in Fig. E), of which the nominal value of the parameter A=0.1. Please design a feedforward gain K and PD controller so that the response of the closed loop system can satisfy the both specifications listed below:【計分:15分】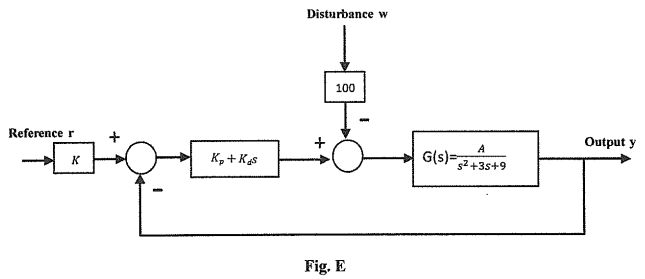
(1) rising time ≦ 0.1sec, overshoot ≦ 10%, steady state error ≦ 5% for the unit step reference commandr