 阿摩線上測驗
阿摩線上測驗
題組內容
4. Fig. D shows a single-link robot driven by a DC servomotor. To amplify the torque τm generated by the motor, a gear transmission with gear ratio n Gie. H= teeth number of Gear 2 / teeth number of Gear 1) is used between the motor shaft and the robot link. Let Im be the moment of inertia of the motor shatt and Gear 1 combination, and It be the moment of inertia of the robot link together with Gear 2. A rotational damper of coefficient bm is placed at the end of Gear I to model the possible viscous friction.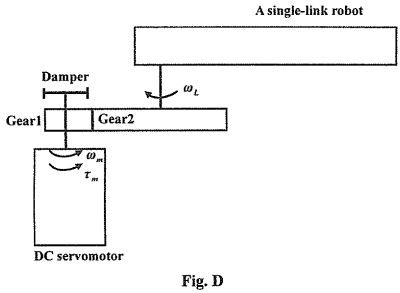
(a) What is the relation between the motor speed ωm and the link speed ωL, and determine the equivalent moment of inertia referred to the motor shaft. (5%)