 阿摩線上測驗
阿摩線上測驗
題組內容
4. Fig. D shows a single-link robot driven by a DC servomotor. To amplify the torque τm generated by the motor, a gear transmission with gear ratio n Gie. H= teeth number of Gear 2 / teeth number of Gear 1) is used between the motor shaft and the robot link. Let Im be the moment of inertia of the motor shatt and Gear 1 combination, and It be the moment of inertia of the robot link together with Gear 2. A rotational damper of coefficient bm is placed at the end of Gear I to model the possible viscous friction.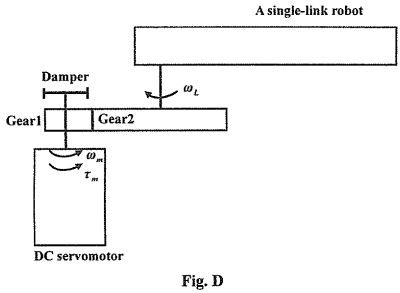
(c) If Im-0.01Kg•m2 ,I L=lKg•m2 , n=10, bm=0.001 Kg•m2/s, determine the system type and find the impulse response and step response of the single-link robot respectively (15%)