題組內容
一、圖一所示之機電系統,其中 I = 4.0 kg·m2 為桿對轉軸的慣性矩,扭力彈簧係數 K = 0.4,
v 為輸入電壓,扭矩 T = Kmv,Km = 4 Nm/V。由於系統的阻尼係數未知,因此輸入
步階(step)電壓測得輸出的最大超越量(overshoot)百分比為 20%。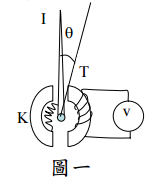
 阿摩線上測驗
登入
阿摩線上測驗
登入