阿摩線上測驗
登入
首頁
>
中山◆電機◆控制系統
>
103年 - 103 國立中山大學_碩士班招生考試_電機系(乙組):控制系統#110068
> 申論題
題組內容
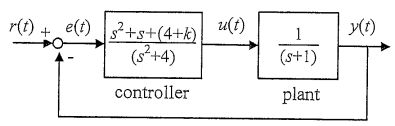
PROBLEM 4(30%) Answer the questions about the feedback system in Fig.4.
b. (15%) Assuming k=0, estimate the amplitude of the steady-state error when the reference input is r(t) = cos(2t).
相關申論題
(a) (10%) Find the transfer function of the system.
#471557
(b) (10%) Find the zero-input response y(t).
#471558
(c) (10%) Choose, among the following types of control, ones that are likely to stabilize the system (One or more answers may be correct. Answers without supporting explanation are not acceptable) : (i) P control (ii) I control (iii) D control (iv) PID control (v) PD control (vi) PI control
#471559
(d) (10%) Choose, among the following types of control, ones that are likely to regulate the system output to a constant level 0.5 with zero steady state error (One or more answers may be correct. Answers without supporting explanation are not acceptable): (1) P control (ii) I control (iii) D control (iv) PID control (v) PD control (vi) PI control
#471560
(a) (10%) Derive a state-space representation of this LCR circuit.
#471561
(b) (10%) Suppose L =C=R=1 and x1(0)=x2(0)=1. What is the output y in steady state if u =sin(t)?
#471562
(c) (10%) Following 2(b), let the control be u(t)=-k1x1(t)-k2x2(t). Choose the gains k1 and k2 such that the closed loop poles are -2 and -3.
#471563
(a) (10%) Use Laplace transform to derive the transfer function from e(t) to e(t-D).
#471564
(b) (10%) Estimate the maximum allowable delay for the system to maintain at least 20 dB of gain margin, by using the approximation , when |ω|<<1.
#471565
PROBLEM 4 (10%) After dozing off in the Monday morning class, your classmate asked you: "Integral control adds negative phase, thus decreasing the phase margin. Why would we ever want to use integral control?" Explain how you would answer him. system.
#471566
相關試卷
110年 - 110 國立中山大學_碩士班招生考試_電機系(乙組):控制系統#104348
110年 · #104348
109年 - 109 國立中山大學_碩士班招生考試_電機系(乙組):控制系統#106059
109年 · #106059
107年 - 107 國立中山大學_碩士班招生考試_電機系(乙組):控制系統#110506
107年 · #110506
106年 - 106 國立中山大學_碩士班招生考試_電機系(乙組):控制系統#125263
106年 · #125263
104年 - 104 國立中山大學_碩士班招生考試_電機系(乙組):控制系統#110054
104年 · #110054
103年 - 103 國立中山大學_碩士班招生考試_電機系(乙組):控制系統#110068
103年 · #110068
102年 - 102 國立中山大學_碩士班招生考試_電機系(乙組):控制系統#110070
102年 · #110070
 阿摩線上測驗
登入
阿摩線上測驗
登入