所屬科目:高中技藝◆機器人
1. 以下對ASIMO P3 機器人的描述,何者 為非 ? (A)他是人形雙足步行機器人。 (B)他可以呈現擬真的臉部表情。 (C)與機器人三大定律的發明作家的姓名相似。 (D)該機器人可勝任接待任務。
2. Hanson Robotics公司為美國一家知名的機器人開發公司,主要研發著重在人臉仿真的技術,該公司設計的機器人Zeno,是模仿哪個人物? (A)青蜂俠 (B)蜘蛛人 (C)原子小金剛 (D)機器戰警。
3. Waseda大學之WF-4RIV長笛演奏機器人,全身共有41個自由度,主要是提升吹長笛時手臂擬人化控制、用演奏音樂來傳達情感和交流,就像真人演奏家一樣。其中,喉部的設計是用什麼方式來模仿真人聲帶改變嗓門的波幅和頻率? (A)控制氣流流量 (B)吸吐氣 (C)振動氣流 (D)控制氣流速度。
4. 救災機器人需具備適應不同環境救災之能力,因此在設計上應具備功能中何項 為非 必需? (A)移動及清理現場能力 (B)生命探測能力 (C)遙控操作能力 (D)防水功能。
5. 在工科技藝競賽機器人職類中,下列哪種行為可能會 違反 比賽規定? (A)比賽時手機必須關機不得使用。 (B)使用通訊軟體,讓同校的選手一起討論比賽狀況。 (C)攜帶手寫板紀錄比賽相關事宜。 (D)攜帶捲尺測量場地。
6. 在國家推動的「智慧機械」,在工科技藝競賽中下列哪個職類跟此項政策有關係? (A)服裝設計 (B)機器人 (C)美髮 (D)餐飲服務。
7. 機器人身上緊急開關之目的,何者應列為 首要 考慮? (A)作為美觀之用 (B)電源開關之用 (C)緊急狀況處理用 (D)電力控制用。
8. 工科技藝競賽機器人職種選手應準備工程筆記本。請問工程筆記本應記載的項目 不包含 下列哪一項? (A)機器人本體機構設計 (B)電路與電子系統設計 (C)機器人外觀美化設計 (D)目標物體取持機構設計。
9. 設計醫療機器人時,何者應列為 首要 考慮? (A)精準度高 (B)成本低 (C)安全性高 (D)病患恢復時間較短。
10. 有關齒條齒輪的傳動,下列敘述何者 正確 ? (A)齒輪齒條傳動是齒輪與齒輪配合的傳動方式。 (B)當齒條主動時,可以將直線運動變成旋轉運動。 (C)當齒輪主動時,可以將直線運動變成旋轉運動。 (D)無法應用於上升下降使用。
11. 機器人在平坦表面上運動,使用何種驅動方式 較為適合 ? (A)輪式 (B)履帶式 (C)滑動式 (D)螺旋槳推進式。
12. 機器人使用輪式或足式驅動方式,其優缺點之比較何項 為對 ? (A)輪式原地轉彎能力較足式差。 (B)輪式穩定性能力較足式好。 (C)皆可使用差動式驅動。 (D)輪式對地牽引力能力較足式好。
13. 那一種接受電子信號指令後能讓某種機構或系統產生特定運動的機構裝置? (A)致動器 (B)電動缸 (C)氣壓缸 (D)油壓缸。
14. 兩彈簧之彈簧常數分別為k1、k2,經並聯後之總彈簧常數為? (A)k1 × k2 (B)k1 + k2 (C) (D)。
15. 電容器在兩導體間的介質增厚時,電容值? (A)變大 (B)變小 (C)不變 (D)不一定。
16. 二極體 不能 達成下列哪一種電路功能? (A)整流 (B)檢波 (C)截波 (D)放大。
17. AC 110 V/60 Hz 的交流電經過全波整流後,輸出的頻率是? (A)30 Hz (B)60 Hz (C)120 Hz (D)90 Hz。
18. 下列何項 非為 常用之直線式致動器? (A)電動缸 (B)液油壓缸 (C)氣壓缸 (D)RC馬達。
19. 人員照護機器人在設計與建造時,應確保設計之耐久性, 不需考量 下列哪一項目? (A)製作成本 (B)機械應力 (C)振動 (D)環境條件(熱、濕氣)。
20. 在直接驅動馬達中,若要控制馬達扭力可調整? (A)電壓 (B)電流 (C)電阻 (D)電感。
21. 馬達使用減速機之目的,下列何者 正確 ? (A)降低輸入電流 (B)降低輸入電壓 (C)提高傳動效率 (D)提高輸出轉矩。
22. 有關感測器的敘述,下列何者 錯誤 ? (A)感測器又稱傳感器。 (B)代替人類感官檢測外界訊息。 (C)壓力感測器是仿效人體的視覺,來感測外在的壓力。 (D)感測器的作用是將一種能量轉換成另一種能量形式。
23. 對射型光電感測器的工作方式下列何者 為真 ? (A)把一個光發射器和一個接收器面對面地裝在一個槽的兩側的是槽形光電。在無阻情況下光接收器能收到光。但當被檢測物體從槽中通過時,光被遮擋,光電開關便動作。輸出一個開關控制信號。 (B)把發光器和收光器分離開,就可使檢測距離加大。使用時把發光器和收光器分別裝在檢測物通過路徑的兩側,檢測物通過時阻擋光路,收光器就動作輸出一個開關控制信號。 (C)把發光器和收光器裝入同一個裝置內,在它的前方裝一塊反光板,利用反射原理完成光電控制作用。一旦光路被檢測物擋住,收光器收不到光時,光電開關就動作,輸出一個開關控制信號。 (D)它的檢測頭裡也裝有一個發光器和一個收光器,但前方沒有反光板。當檢測物通過時擋住了光,並把光部分反射回來,收光器就收到光信號,輸出一個開關信號。
24. 機器人可利用以下哪一個感測器來測量重力? (A)陀螺儀 (B)電子羅盤 (C)加速度計 (D)顏色感測器。
25. 如果輪型機器人必須循著黑色膠帶行進,下列感測元件何者 比較合適 ? (A)光電感測器 (B)超音波 (C)熱敏電阻 (D)電子羅盤。
26. 以下哪一種元件可以感測距離? (A)反射型紅外線感測器 (B)聲音感測器 (C)電子羅盤 (D)加速度計。
27. 以下哪一種感測元件易受環境光線影響? (A)超音波感測器 (B)紅外線感測器 (C)GPS定位模組 (D)溫度感測器。
28. 光遮斷器的受光元件是? (A)光電晶體 (B)LED (C)二極體 (D)太陽能板。
29. 想要增加紅外線感測器之量測距離,可採用何種方式? (A)採用高功率紅外線LED。 (B)增加紅外線LED之串聯電阻值。 (C)降低電路之電源。 (D)維持定電流驅動。
30. 雷射測距儀於環境地圖建立及機器人定位問題上,具有許多優勢,但也有缺點,例如射出之雷射光會發生下列何種狀況? (A)會被白色物體吸收 (B)會穿透玻璃 (C)會被鏡子折射 (D)射程距離太短。
31. 應用於馬達轉速偵測的光遮斷圓盤有1024個透光孔,若累計測得2048個脈波,則此時段內馬達轉動的角度為? (A)90度 (B)1024度 (C)720度 (D)2048度。
32. 霍爾感測器主要是用來偵測? (A)電壓 (B)磁場 (C)溫度 (D)電場。
33. 一般影像處理常會把RGB影像轉換為HSV系統。請問其中的V代表什麼意義? (A)飽和度 (B)色相 (C)亮度 (D)彩度。
34. KNRm的直流馬達規格,齒輪比為27:1,編碼器的光遮斷圓盤有32個透光孔,輸出軸旋轉一圈,會累計測得多少脈波? (A)256 (B)512 (C)864 (D)1024。
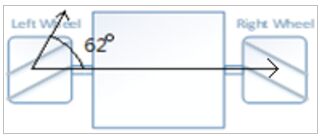
35. 如下圖所示,二輪機器人輪胎直徑為6.7公分,二輪的間距為16.8公分,請問機器人向前往左旋轉62度,請計算右輪子需要移動的距離?
(A) 21cm(B)18.1cm (C)7.25cm (D)14.5cm。
36. 二輪機器人輪胎直徑為8.3公分,請問向後直走39.7公分,輪胎旋轉了多少角度?_______度。 (A)420 (B)480 (C)548 (D)720
37. 如果輪型機器人採用RC伺服機在脈波寬度等於1.5ms時靜止不動,以下哪個脈波寬度會使伺服機轉動 最快 ? (A)1.6 ms (B)1.8 ms (C)2.0 ms (D)2.2 ms。
38. 請問下圖麥克納姆輪沿著粗箭頭指示的方向移動,其1~4輪面對轉軸細線所指的轉向為何?
(A)逆、靜止、靜止、順。 (B)順、逆、順、逆。 (C)順、靜止、順、靜止。 (D)逆、逆、逆、逆。
39. 循跡自走車採用5個紅外線光反射器感測路徑狀態,若偵測到軌跡為1,未偵測到為0,則當自走車往前行走,偵測到由左至右數值為00110的感測值時,代表自走車的狀態為? (A)車身稍偏至軌跡左邊。 (B)車身稍偏至軌跡右邊。 (C)車身偏至軌跡左邊很多。 (D)車身偏至軌跡右邊很多。
40. 有關旋轉馬達和線性馬達之特性說明何項 為非 ? (A)旋轉馬達之轉子與定子需透過旋轉軸承來保持動子在磁軌上之位置。 (B)線性馬達需透過線性滑軌來保持動子在磁軌上之位置液油壓缸。 (C)線性馬達需透過直線編碼器來回授其位置資訊。 (D)旋轉馬達需透過直線編碼器來回授其位置資訊。
41. 如下圖所示,二輪機器人輪胎直徑為9.6公分,請問輪胎旋轉了72度時機器人移動了多少距離?
(A)4.896 cm (B)5.451 cm (C)5.802 cm (D)6.032 cm。
42. LabVIEW的陣列中,第一個元素其索引值為下列何者? (A)0 (B)1 (C)2 (D)3。
43. 對於一般程式而言,二維陣列ROW有12個元素、COL有16個元素,每個元素的數值型態為布林,請計算這個陣列所占用的Bytes數? (A)12 (B)24 (C)35 (D)48。
44. 依下圖所示其輸出結果為何?
(A)3、0、5。 (B)7、8、1、5。 (C)7、4、9。 (D)1。
45. 在LabVIEW按鈕的機械動作特性中,按下立即切換為下列何者圖示? (A) (B) (C) (D)。
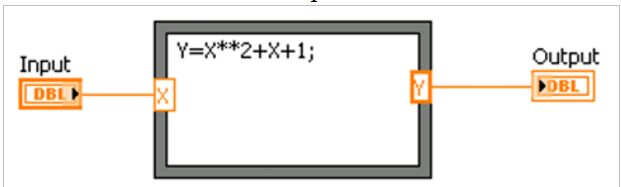
46. 依下圖所示,Input為5,其輸出結果為何?
(A)5 (B)19 (C)25 (D)31
47. 藍芽 (Bluetooth)是一種無線通訊技術,技術始於哪一家公司的1994方案? (A)Sony (B)Nokia (C)Ericsson (D)Intel。
48. WiFi是一個建立於IEEE何種標準下的無線區域網路 (WLAN)設備? (A)802.11 (B)802.16 (C)802.13 (D)802.15。
49. 基於安全考量,選用工業機器人時需考慮? (A)作業之功能。 (B)操作方便性。 (C)購買及維護成必要本。 (D)防止錯誤動作時之緊急停止運作功能。
50. 依據中華民國國家標準-工業機器人之安全要求 (CNS 14490-1),哪一項 不在規範 之內? (A)噪音 (B)機械危害 (C)電器危害 (D)輻射危害。
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (D)
(D) 。
。 (A) 21cm(B)18.1cm (C)7.25cm (D)14.5cm。
(A) 21cm(B)18.1cm (C)7.25cm (D)14.5cm。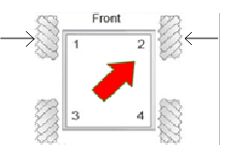 (A)逆、靜止、靜止、順。 (B)順、逆、順、逆。 (C)順、靜止、順、靜止。 (D)逆、逆、逆、逆。
(A)逆、靜止、靜止、順。 (B)順、逆、順、逆。 (C)順、靜止、順、靜止。 (D)逆、逆、逆、逆。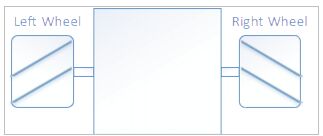 (A)4.896 cm (B)5.451 cm (C)5.802 cm (D)6.032 cm。
(A)4.896 cm (B)5.451 cm (C)5.802 cm (D)6.032 cm。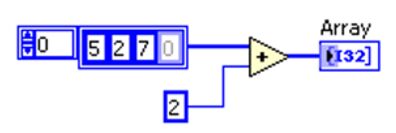 (A)3、0、5。 (B)7、8、1、5。 (C)7、4、9。 (D)1。
(A)3、0、5。 (B)7、8、1、5。 (C)7、4、9。 (D)1。 (B)
(B) (C)
(C) (D)
(D)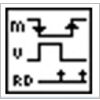 。
。 (A)5 (B)19 (C)25 (D)31
(A)5 (B)19 (C)25 (D)31