所屬科目:高中技藝◆機器人
1.美國好萊塢電影凡是處理機器人的題材,總是會引用「機器人學三大法則」,以下哪一個 不是 三大法則? (A)機器人因工作性質,可以傷害自己。 (B)機器人必須保護自己。 (C)機器人不得傷害人類。 (D)機器人必須服從人類的命令。
2.娛樂機器人為目前機器人邁進家庭的途徑之一,下列哪一個機器人 不是 娛樂機器人? (A)AIBO(B)Pleo(C)PUMA(D)Robo Sapien
3.工業用機器人與家用機器人之比較,兩者 主要相同 之處為? (A)兩者之應用場所不同。 (B)家用機器人需要與人互動,必須具有視覺與聽覺等功能,工業機器人則不需要。 (C)工業機器人為固定模式之重複性工作,家用機器人則屬於任務導向。 (D)皆為取代或服務人類。
4.輪行機器人與人形機器人之比較,以下何者 為非 ? (A)人行機器人由於外表特徵和人類相同,對地形與環境的適應性與泛用性較強。 (B)輪型機器人機動性高,耗損能量少。 (C)輪型機器人可荷載及裝配的設備較多。 (D)人型機器人開發成本與技術門檻較高。
5.ZMP是步態穩定控制的重要數據,當ZMP均落在腳掌範圍內,則機器人可以穩定行走,請問ZMP指的是? (A)水平角度(B)前傾角度(C)反作用力(D)零力矩點
6.根據國際機器人聯盟(IFR)的定義,以下何者 為非 ? (A)機器人可分為「產業用機器人」與「服務型機器人」兩大類。 (B)產業用機器人主要運用在各種製造廠房中,多半以機械手臂為主。 (C)服務型機器人以保全、伴侶、醫療照護、家庭勞務、教育、休閒娛樂等方面為發展主軸。 (D)產業用機器人是未來機器人產業的發展重點,將是推動全球經濟的成長引擎。
7.微秒(microsecond)是處理器計量速度的時間單位之一,1微秒等於? (A)千分之一秒(B)十萬分之一秒(C)千萬分之一秒(D)百萬分之一秒
8.製作出世界第一台工業機器人並成立世界上第一家工業機器人製造工廠,是哪一個國家? (A)德國(B)日本(C)俄國(D)美國
9.設計醫療機器人時,何者應列為 首要 考慮? (A)精準度高(B)成本低(C)安全性高(D)病患恢復時間較短
10.機器人身上之工作指示燈之目的,何者應列為 首要 考慮? (A)作為美觀之用(B)表示機器人在工作狀態(C)信號通訊之用(D)電力顯示用
11.下列何種工具不適合應用在機器人活動關節上? (A)防滑螺帽(B)鋸齒螺帽(C)快速插銷(黑)(D)快速插銷(白)
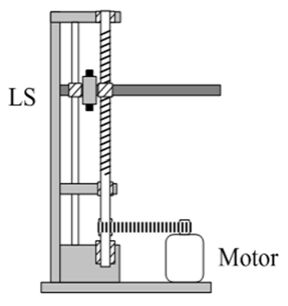
12.下圖中的結構設計是利用哪種傳動?
(A)螺桿傳動(B)齒條齒輪傳動(C)履帶式傳動(D)動滑輪傳動
13.如果要完成機器人三輪全方向位移該選用何種輪子? (A)麥克納姆輪(B)光頭胎(C)全向輪(D)一般輪子
14.下列何者 不是 使用全方位輪移動平台的 優點 ? (A)不需要旋轉即可以左右橫移。 (B)360度全方位移動且不用改變車身方向。 (C)移動速度比較快。 (D)可在狹窄的通道移動。
15.下列有關夾爪的敘述何者 正確 ? (A)夾爪的長度並不會影響力矩。 (B)若兩個RC Servor在機構上互咬並不會造成損壞。 (C)夾爪需依不同的情形或是不同的需求進行設計。 (D)一隻夾爪只能有一個RC Servor。
16.下圖為DIP IC頂視圖,試問標示為A的腳號為?
(A)第1腳(B)第4腳(C)第5腳(D)第8腳
17.橙白紅金紅的精密電阻值為? (A)39.2±2%歐姆(B)47.2±2%歐姆(C)392±2%歐姆(D)472±2%歐姆
18.AC 110 V/60 Hz的交流電經過全波整流後,輸出的頻率是? (A)30 Hz(B)60 Hz(C)120 Hz(D)90 Hz
19.有一馬達效率為80%,輸入功率為1865瓦特,則其輸出馬力數為多少?(1馬力=746瓦特) (A)1.8(B)2(C)2.2(D)1492
20.在齒輪系中設置惰輪,目的為何? (A)改變減速比(B)增加傳動效率(C)改變轉動方向(D)減少齒輪干涉現象
21.請問在影像處理使用高通濾波器有下列何者功能? (A)去除低頻訊號(B)強化影像邊緣(C)將影像平滑化(D)強化影像亮度
22.三軸加速度計會與下列何種感測器組成慣性量測單元? (A)陀螺儀(B)指南針(C)煙霧感測(D)瓦斯感測
23.電子羅盤需要校正原因為下列何者? (A)電子羅盤本身設計需要校正。 (B)受磁場環境的影響。 (C)因為角速度會有慣性。 (D)因周遭聲音吵雜。
24.如果一台機器人要移動到箱子前10公分後停下來,請問下列哪種感測器 比較適合 ? (A)觸碰感測器(B)顏色感測器(C)陀螺儀(D)超音波感測器
25.對射型光電感測器的工作方式下列何者 為真 ? (A)槽形光電 (B)把發光器和收光器分離開,檢測物通過時阻擋光路,收光器就動作輸出一個開關控制信號。 (C)反光板反射原理 (D)漫反射式
26.顏色感測器所發射的光是什麼顏色? (A)藍色(B)紅色(C)黃色(D)白色
27.常用來量測機器人是否傾倒的感測器為? (A)陀螺儀(B)里程計(C)電子羅盤(D)紅外線感測器
28.如果超音波在空氣的傳遞速度為344m/sec,機器人發射及接收超音波反射信號共耗時0.1sec,試問機器人與障礙物之距離約為多少公尺? (A)17.2 m(B)8.6 m(C)4.3m(D)34.4m
29.以下哪一種感測元件 不具 有指向性? (A)超音波感測器(B)紅外線感測器(C)GPS定位模組(D)雷射感測器
30.應用於馬達轉速偵測的光遮斷圓盤有60個透光孔,若在1分鐘測得720個脈波,則馬達轉速為? (A)6 rpm(B)12 rpm(C)24 rpm(D)3 rpm
31.用一個1.3 Kg-cm的RC Servor要將重200公克的貨物舉起。試問手臂應製作在幾公分內才能將物體舉起? (A)7(B)7.5(C)6.5(D)8 cm
32.KNRm的直流馬達規格,齒輪比為64:1,編碼器的光遮斷圓盤有16個透光孔,輸出軸旋轉一圈,會累計測得多少脈波? (A)256(B)512(C)768(D)1024
33.如下圖所示,二輪機器人向前往右旋轉,請問左右輪子面向輸出軸的轉向為何?
(A)左為順時針、右為不動。 (B)左為不動、右為逆時針。 (C)左為不動、右為順時針。 (D)左為逆時針、右為不動。
34.伺服馬達(RC servo)已廣泛使用在遙控車、遙控飛機油門或方向的控制,其控制方式一般為? (A)脈波數碼調變技術PCM (B)脈波振幅調變技術 (C)頻率調變技術FM (D)脈波寬度調變
35.關於步進馬達(step motor)的敘述何者 錯誤 ? (A)步進馬達轉速越快時,轉矩愈小。 (B)步進馬達沒有位置累進誤差的問題。 (C)步進馬達以數位訊號來控制轉速及位置。 (D)步進馬達的控制以閉迴路控制方式居多。
36.在外殼標示200 STEP的步進馬達,他的一個步進角是? (A)1度(B)1.8度(C)2度(D)20度
37.請問下圖麥克納姆輪沿著粗箭頭指示的方向移動,其1~4輪面對轉軸細線所指的轉向為何?
(A)靜止、順、靜止、順 (B)逆、靜止、逆、靜止 (C)順、靜止、順、靜止 (D)靜止、逆、靜止、逆
38.循跡自走車採用5個紅外線光反射器感測路徑狀態,若偵測到軌跡為1,未偵測到為0,則當自走車往前行走,偵測到由左至右數值為00011的感測值時,代表自走車的狀態為? (A)車身稍偏至軌跡左邊 (B)車身稍偏至軌跡右邊 (C)車身偏至軌跡左邊很多 (D)車身偏至軌跡右邊很多
39.在PID控制系統中,為 消除穩態 誤差要使用何種控制? (A)P控制(B)I控制(C)D控制(D)PD控制
40.移動機器人學的三個關鍵問題中,下列選項何者 為非 ? (A)我在那裡?(B)我要去那裡?(C)我如何到達那裡(D)價格有多貴
41.在Vision acquisition中,請問使用羅技C310最大的fps能設定為多少? (A)12(B)18(C)25(D)30
42.在Labview中,下圖的的連接線的格式為下列何者為 正確 ?
(A)雙精準浮點數資料線 (B)二維雙精準浮點數資料線 (C)一維布林資料線 (D)一維整數資料線
43.在Labview中,下圖的資料格式為下列何者?
(A)無符號64位元整數 (B)有符號64位元整數 (C)字串 (D)無符號64位元浮點數
44.下圖為Labview的wait,請問wait執行的單位為下列何者?
(A)sec(B)ms(C)us(D)ns
45.在Labview按鈕的機械動作特性中,按下釋放方才切換為下列何者圖示? (A)(B)(C)(D)
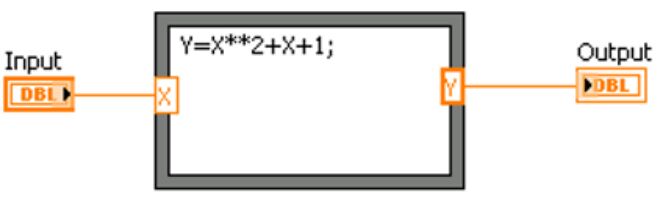
46.依下圖所示,Input為5其輸出結果為何?
(A)5(B)19(C)25(D)31
47.常見的機器人室內定位技術包括ZigBee及Bluetooth,兩者的工作頻率均可設定成? (A)868 MHz(B)915 MHz(C)1830 MHz(D)2.4 GHz
48.所謂電池容量即電池所能供應之? (A)電壓與電流之乘積 (B)電壓與時間之乘積 (C)電流與時間之乘積 (D)電流平方與時間之乘積
49.下列何者 非 保護性停止應具備的主要功能? (A)移除或控制機器人驅動致動器之動力 (B)停止功能僅能由控制邏輯啟動 (C)容許控制任何受機器人控制之危害 (D)停止所有機器人運動
50.機器人意外事故的發生,可歸納區分的類別 不包括 下列哪一項? (A)在機器人的可動範圍之內被機器人的移動件撞擊 (B)被機器人掉落或是噴射出的物件或工具撞擊 (C)被陷入在機器人的移動件和其他機械或物件之中 (D)機器人因故障而無法執行特定功能
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)螺桿傳動(B)齒條齒輪傳動(C)履帶式傳動(D)動滑輪傳動
(A)螺桿傳動(B)齒條齒輪傳動(C)履帶式傳動(D)動滑輪傳動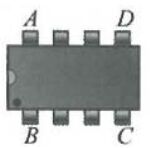 (A)第1腳(B)第4腳(C)第5腳(D)第8腳
(A)第1腳(B)第4腳(C)第5腳(D)第8腳 (A)左為順時針、右為不動。 (B)左為不動、右為逆時針。 (C)左為不動、右為順時針。 (D)左為逆時針、右為不動。
(A)左為順時針、右為不動。 (B)左為不動、右為逆時針。 (C)左為不動、右為順時針。 (D)左為逆時針、右為不動。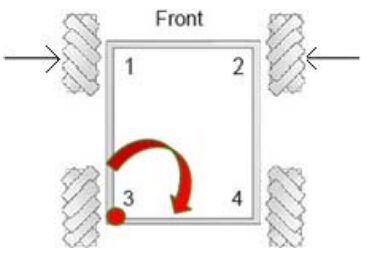 (A)靜止、順、靜止、順 (B)逆、靜止、逆、靜止 (C)順、靜止、順、靜止 (D)靜止、逆、靜止、逆
(A)靜止、順、靜止、順 (B)逆、靜止、逆、靜止 (C)順、靜止、順、靜止 (D)靜止、逆、靜止、逆 (A)雙精準浮點數資料線 (B)二維雙精準浮點數資料線 (C)一維布林資料線 (D)一維整數資料線
(A)雙精準浮點數資料線 (B)二維雙精準浮點數資料線 (C)一維布林資料線 (D)一維整數資料線 (A)無符號64位元整數 (B)有符號64位元整數 (C)字串 (D)無符號64位元浮點數
(A)無符號64位元整數 (B)有符號64位元整數 (C)字串 (D)無符號64位元浮點數 (A)sec(B)ms(C)us(D)ns
(A)sec(B)ms(C)us(D)ns (B)
(B) (C)
(C) (D)
(D)
 (A)5(B)19(C)25(D)31
(A)5(B)19(C)25(D)31