 阿摩線上測驗
阿摩線上測驗
114年 - 17000 機電整合 乙級 工作項目 01:自動化機械元件的應用及設計 101-150(2025/12/26 更新)#135791
試卷資訊
所屬科目:技檢◆機電整合-乙級
選擇題 (50)
 (A)DC馬達 (B)AC 馬達 (C)伺服馬達 (D)變頻馬達 。
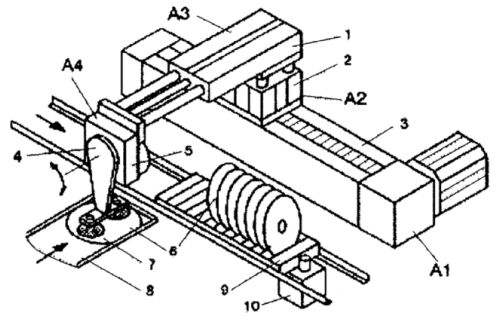
(A)DC馬達 (B)AC 馬達 (C)伺服馬達 (D)變頻馬達 。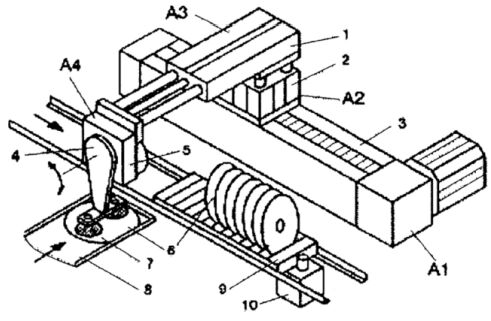 (A)A4 吸、A3 退、A4 轉、A2 升、A1 右、A2 降、A4 放 (B)A4吸、A4 轉、A2 升、A3 退、A2 降、A1 右、A4 放 (C)A4 吸、A2 升、A1 右、A4 轉、A2 降、A3 退、A4 放 (D)A4 吸、A2 升、A3 退、A4轉、A1 右、A2 降、A4 放 。
(A)A4 吸、A3 退、A4 轉、A2 升、A1 右、A2 降、A4 放 (B)A4吸、A4 轉、A2 升、A3 退、A2 降、A1 右、A4 放 (C)A4 吸、A2 升、A1 右、A4 轉、A2 降、A3 退、A4 放 (D)A4 吸、A2 升、A3 退、A4轉、A1 右、A2 降、A4 放 。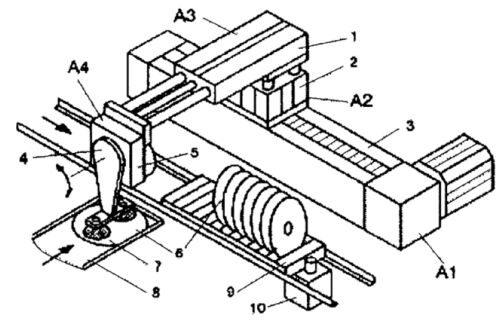 (A)取放單元(P&P) (B)SCARA 機械臂 (C)史都華(Stewart)平台 (D)惠氏機構(Whitworth) 。
(A)取放單元(P&P) (B)SCARA 機械臂 (C)史都華(Stewart)平台 (D)惠氏機構(Whitworth) 。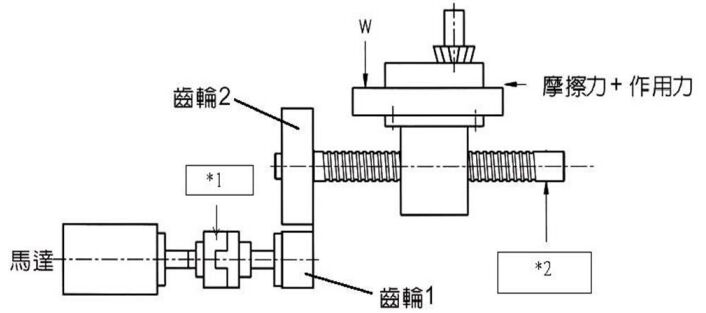 (A)聯軸器 (B)離合器 (C)緩衝器 (D)萬向接頭 。
(A)聯軸器 (B)離合器 (C)緩衝器 (D)萬向接頭 。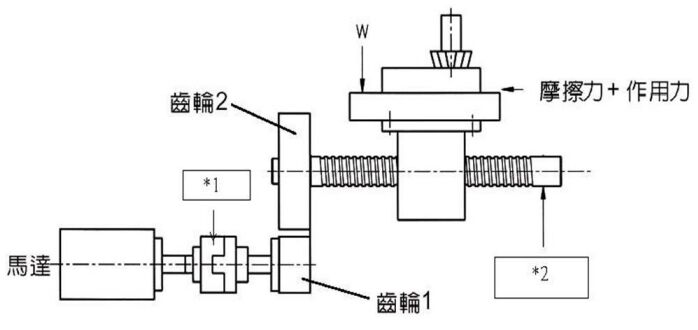 (A)聯軸器 (B)離合器 (C)緩衝器 (D)導螺桿 。
(A)聯軸器 (B)離合器 (C)緩衝器 (D)導螺桿 。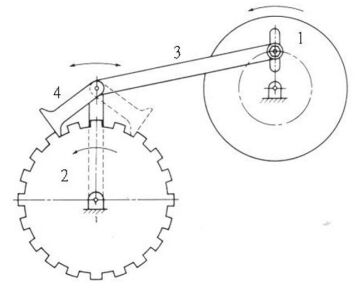 (A)單向連續旋轉(B)雙向連續旋轉 (C)單向間歇旋轉 (D)雙向間歇旋轉 。
(A)單向連續旋轉(B)雙向連續旋轉 (C)單向間歇旋轉 (D)雙向間歇旋轉 。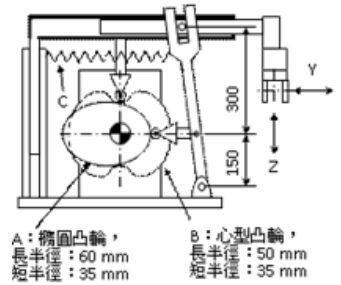 (A)15 (B)25 (C)35 (D)45 。
(A)15 (B)25 (C)35 (D)45 。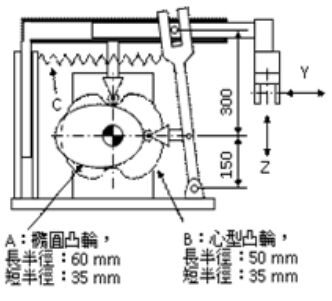 (A)25 (B)50 (C)75 (D)100 。
(A)25 (B)50 (C)75 (D)100 。 (A)〝一〞字 (B)〝V〞字 (C)〝X〞字 (D)〝ㄇ〞字 型軌跡。
(A)〝一〞字 (B)〝V〞字 (C)〝X〞字 (D)〝ㄇ〞字 型軌跡。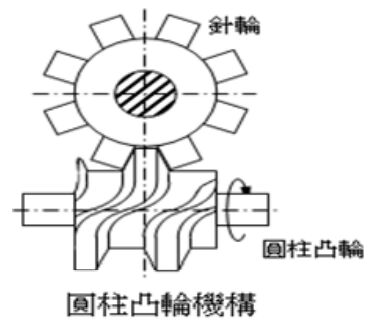 (A)直線轉間歇圓周 (B)連續圓周轉間歇圓周 (C)連續搖擺轉直線 (D)曲線轉直線運動 。
(A)直線轉間歇圓周 (B)連續圓周轉間歇圓周 (C)連續搖擺轉直線 (D)曲線轉直線運動 。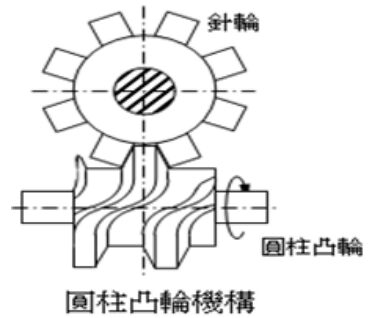 (A)逆時鐘旋轉 1/8 轉 (B)順時鐘旋轉 1/4 轉 (C)逆時鐘旋轉1/4 轉 (D)順時鐘旋轉 1/8 轉 。
(A)逆時鐘旋轉 1/8 轉 (B)順時鐘旋轉 1/4 轉 (C)逆時鐘旋轉1/4 轉 (D)順時鐘旋轉 1/8 轉 。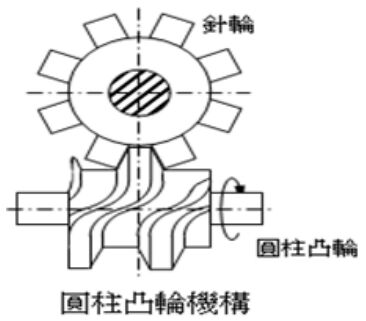 (A)繼續順時鐘旋轉 1/8 轉 (B)繼續逆時鐘旋轉 1/4 轉 (C)靜止不動,並具有剎車功能 (D)靜止不動,無剎車功能,但外力作用時會轉動 。
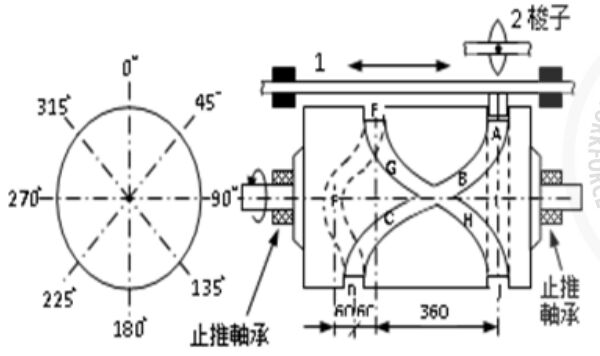
(A)繼續順時鐘旋轉 1/8 轉 (B)繼續逆時鐘旋轉 1/4 轉 (C)靜止不動,並具有剎車功能 (D)靜止不動,無剎車功能,但外力作用時會轉動 。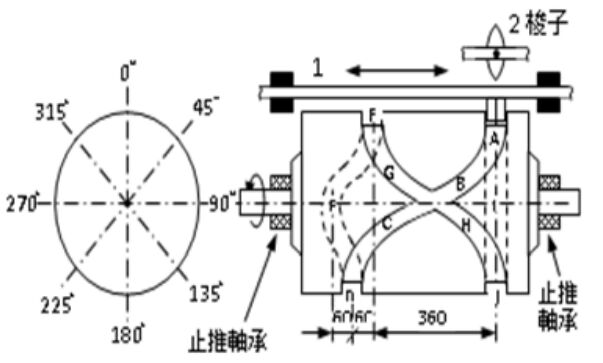 (A)從 A→B→C→D 依序向左移動 420 距離 (B)從 A→J→I 靜止不動 (C)從 A→B→G→F 依序向左移動 360 距離 (D)從 A→B→G→F→E 依序向左移動 480 距離 。
(A)從 A→B→C→D 依序向左移動 420 距離 (B)從 A→J→I 靜止不動 (C)從 A→B→G→F 依序向左移動 360 距離 (D)從 A→B→G→F→E 依序向左移動 480 距離 。
118. 有一圓柱凸輪機構,若主動圓柱形凸輪軸如圖示方向轉動,從__________ 則上方從動梭子的位置是左右靜止不動。
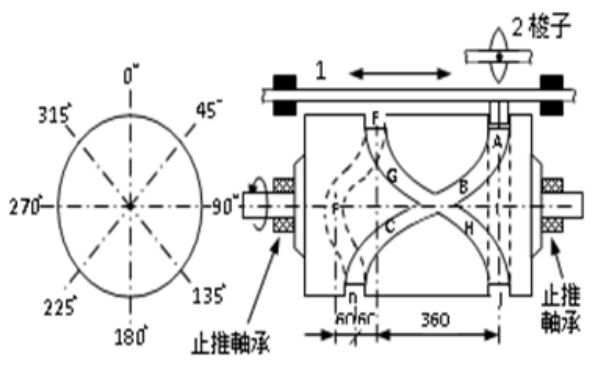 (A)A→B→C→D (B)D→E→F (C)F→G→H→I (D)I→J→A
(A)A→B→C→D (B)D→E→F (C)F→G→H→I (D)I→J→A
(A)A→B→C→D (B)D→E→F (C)F→G→H→I (D)I→J→A
 (A)1 (B)2 (C)3(D)4 圈。
(A)1 (B)2 (C)3(D)4 圈。
137. 有一雙搖桿機構,若左邊搖桿長度(l1)小於右邊搖桿長度(l2)時,則左邊搖桿的搖動角度(α1)和右邊的搖動角度(α2),何者較大? (A)左邊 (B)右邊 (C)忽大忽小 (D)很難判定 。