阿摩線上測驗
登入
首頁
>
技檢◆機電整合-乙級
> 114年 - 17000 機電整合 乙級 工作項目 01:自動化機械元件的應用及設計 151-189(2025/12/26 更新)#135792
114年 - 17000 機電整合 乙級 工作項目 01:自動化機械元件的應用及設計 151-189(2025/12/26 更新)#135792
科目:
技檢◆機電整合-乙級 |
年份:
114年 |
選擇題數:
39 |
申論題數:
0
試卷資訊
所屬科目:
技檢◆機電整合-乙級
選擇題 (39)
複選題
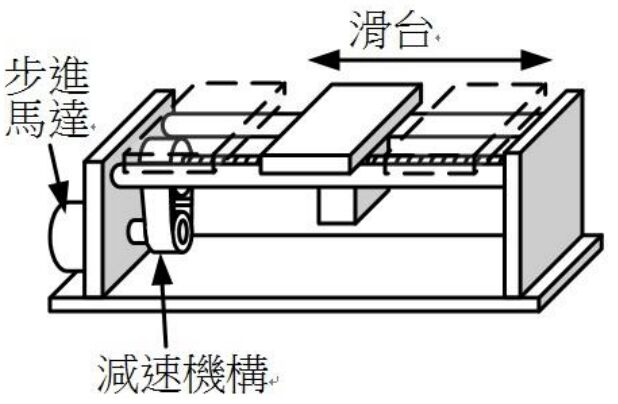
151. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為 0.72°,馬達輸出軸配有一減速比 i 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若導螺桿每轉動 5 圈,滑台移動 30mm,此滑台定位之解析度 R=2.0 μm,下列敘述哪些正確?
(A)減速比 i = 6:1 (B)螺桿之導程 L=6 mm (C)減速比 i = 5:1 (D)螺桿之導程 L=8 mm 。
複選題
152. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為 0.9°,馬達輸出軸配有一減速比 i 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若導螺桿每轉動 10 圈,滑台移動 60mm,此滑台定位之解析度 R=1.0 μm,下列敘述哪些正確?
(A)減速比 i = 12.5:1 (B)螺桿之導程 L=6 mm (C)減速比 i = 15:1 (D)螺桿之導程 L=8 mm 。
複選題
153. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為 1.8°,馬達輸出軸配有一減速比 12.5:1 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若步進馬達驅動脈波頻率 f=3k pps(Hz),導螺桿每轉動 10 圈,滑台移動 50mm,下列敘述哪些正確?
(A)滑台之速度V=6 mm/sec (B)滑台之速度 V=10 mm/sec (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。
複選題
154. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為 0.9°,馬達輸出軸配有一減速比 5:1 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若步進馬達驅動脈波頻率 f=2k pps(Hz),導螺桿每轉動 5 圈,滑台移動 50mm,下列敘述哪些正確?
(A)滑台之速度 V=6mm/sec (B)滑台之速度 V=10 mm/sec (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。
複選題
155. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進角度為 0.72°,控制時使用半步進功能,馬達輸出軸配有一減速比 5:1 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若步進馬達驅動脈波頻率 f=2kpps(Hz),導螺桿每轉動 5 圈,滑台移動 50mm,下列敘述哪些正確?
(A)滑台之速度 V=4 mm/sec (B)滑台之速度 V=6 mm/sec (C)螺桿之導程L=5 mm (D)螺桿之導程 L=10 mm 。
複選題
156. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為θ,馬達輸出軸配有一減速比 8:1 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若步進馬達驅動脈波頻率 f=3k pps(Hz),導螺桿每轉動 10 圈,滑台移動 60mm,此滑台定位之解析度 R=1.5 μm,下列敘述哪些正確?
(A)步進角度θ= 0.72° (B)滑台之速度 V=27 cm/min (C)滑台之速度 V=24 cm/min (D)步進角度θ=0.36° 。
複選題
157. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為θ,馬達輸出軸配有一減速比 6:1 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若步進馬達驅動脈波頻率 f=4k pps(Hz),導螺桿每轉動 10 圈,滑台移動 60mm,此滑台定位之解析度 R=1.0 μm,下列敘述哪些正確?
(A)步進角度θ= 0.72° (B)滑台之速度 V=27 cm/min (C)滑台之速度 V=24 cm/min (D)步進角度θ=0.36° 。
複選題
158. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為 1.8°,馬達輸出軸配有一減速比 10:1 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若步進馬達驅動脈波數 N=20k pulses,導螺桿每轉動 10 圈,滑台移動 50mm,下列敘述哪些正確?
(A)滑台之移動距離S=50 mm (B)滑台之移動距離 S=60 mm (C)螺桿之導程 L=10 mm (D)螺桿之導程 L=5 mm 。
複選題
159. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進馬達之全步進角度為 0.9°,馬達輸出軸配有一減速比 12.5:1 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若步進馬達驅動脈波數量 N=30k pulses,導螺桿每轉動 10 圈,滑台移動 100mm,下列敘述哪些正確?
(A)滑台之移動距離 S=50 mm (B)滑台之移動距離 S=60 mm (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。
複選題
160. 如下圖所示,有一步進馬達驅動一組定位工作平台,此步進角度為 0.72°,控制時使用半步進功能,馬達輸出軸配有一減速比 12.5:1 之減速齒輪組,齒輪組之輸出軸接至導螺桿。若步進馬達驅動脈波數量 N=30kpulses,導螺桿每轉動 10 圈,滑台移動 100mm,下列敘述哪些正確?
(A)滑台之移動距離 S=24 mm (B)滑台之移動距離 S=30 mm (C)螺桿之導程L=5 mm (D)螺桿之導程 L=10 mm 。
複選題
161. 如下圖所示,有一雙凸輪機構,以夾爪為中心點來看,下列敘述哪些正確?
(A)彈簧 C 係使從動件確保接觸凸輪 A (B)彈簧 C 係使從動件確保接觸凸輪 B (C)水平方向 y 是以凸輪 A 驅動 (D)水平方向 y 是以凸輪 B 驅動 。
複選題
162. 如下圖所示,有一雙凸輪機構,以夾爪為中心點來看,下列敘述哪些正確?
(A)夾爪的運動路徑為ㄇ字型 (B)夾爪的運動路徑為 L 字型 (C)垂直方向 z 是以凸輪 A 驅動 (D)垂直方向 z 是以凸輪 B 驅動 。
複選題
163. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=3、伺服馬達分解能 P
t
=131072 pulse/rev、電子齒輪比
,如導螺桿每轉動 10 圈,滑台移動 50mm,若欲每輸出 1 pulse 滑台要有 1μm 移動量,下列敘述哪些正確?
(A)
(B)
(C)螺桿之導程 L=5 mm (D)螺桿之導程L=8 mm 。
複選題
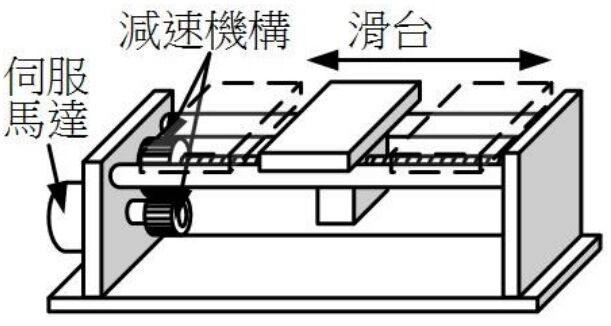
164. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=5、伺服馬達分解能 Pt=131072 pulse/rev、電子齒輪比
,如導螺桿每轉動 10 圈,滑台移動 80mm,若欲每輸出 1 pulse 滑台要有 2μm 移動量,下列敘述哪些正確?
(A)
(B)
(C)螺桿之導程 L=5 mm (D)螺桿之導程 L=8 mm 。
複選題
165. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=3、螺桿導程 L=5㎜、伺服馬達分解能 P
t
=131072 pulse/rev、電子齒輪比
,如欲每輸出 1 pulse 滑台要有 1.25μm 移動量,若控制脈波頻率 f=80k pps(Hz),下列敘述哪些正確?
(A)
(B)
(C)滑台移動速度V=20 cm/sec (D)滑台移動速度 V=10 cm/sec 。
複選題
166. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=5、螺桿導程L=10 ㎜、伺服馬達分解能 Pt=131072 pulse/rev、電子齒輪比
,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若控制脈波頻率 f=100kpps(Hz),下列敘述哪些正確?
(A)
(B)
(C)滑台移動速度 V=20 cm/sec (D)滑台移動速度 V=10 cm/sec 。
複選題
167. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=5、螺桿導程 L=8㎜、伺服馬達分解能 Pt=131072 pulse/rev、電子齒輪比
,若控制脈波頻率 f=150k pps(Hz),下列敘述哪些正確?
(A)滑台解析度R=2.0μm (B)滑台移動速度 V=30 cm/sec (C)滑台解析度 R=1.25μm (D)滑台移動速度 V=18.75 cm/sec 。
複選題
168. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=3、螺桿導程 L=5㎜、伺服馬達分解能 P
t
=131072 pulse/rev、電子齒輪比
,若控制脈波頻率 f=150k pps(Hz) ,下列敘述哪些正確?
(A)滑台解析度R=2.0μm (B)滑台移動速度 V=30 cm/sec (C)滑台解析度 R=1.25μm (D)滑台移動速度 V=18.75 cm/sec 。
複選題
169. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=5、螺桿導程 L=8㎜、伺服馬達分解能 P
t
=131072 pulse/rev、電子齒輪比
,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若控制脈波頻率 f,滑台的移動速度 V =30 cm/sec,下列敘述哪些正確?
(A)f=150k pps(Hz) (B)f=200kpps(Hz) (C)
(D)
。
複選題
170. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=3、螺桿導程 L=5㎜、伺服馬達分解能 Pt=131072 pulse/rev、電子齒輪比 ,如欲每輸出 1 pulse 滑台要有 1.5μm 移動量,若控制脈波頻率 f,滑台的移動速度 V =30 cm/sec,下列敘述哪些正確?
(A)f=150k pps(Hz) (B)f=200kpps(Hz) (C)
(D)
。
複選題
171. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=5、螺桿導程 L=8㎜、伺服馬達分解能 P
t
=131072 pulse/rev、電子齒輪比
,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若脈波輸出數 N=100k pulses,下列敘述哪些正確?
(A)
(B)
(C)移動距離 S=20cm (D)移動距離 S=15 cm 。
複選題
172. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=3、螺桿導程 L=5㎜、伺服馬達分解能 P
t
=131072 pulse/rev、電子齒輪比
,如欲每輸出 1 pulse 滑台要有 1.0μm 移動量,若脈波輸出數 N=150k pulses,下列敘述哪些正確?
(A)
(B)
(C)移動距離 S=20 cm (D)移動距離 S=15 cm 。
複選題
173. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=5、螺桿導程 L=8㎜、伺服馬達分解能 P
t
=131072 pulse/rev、電子齒輪比
,若滑台的移動距離 S =30 cm,下列敘述哪些正確?
(A)滑台解析度 R=1.5μm (B)所需脈波數 N=200k pulses (C)滑台解析度 R=1.25μm (D)所需脈波數 N=160k pulses 。
複選題
174. 如下圖所示,為伺服馬達驅動滑台機構圖,減速比 i=3、螺桿導程 L=5㎜、伺服馬達分解能 P
t
=131072 pulse/rev、電子齒輪比
,若滑台的移動距離 S =20 cm,下列敘述哪些正確?
(A)滑台解析度R=1.5μm (B)所需脈波數 N=200k pulses (C)滑台解析度 R=1.25μm (D)所需脈波數 N=160k pulses 。
複選題
175. 滾珠螺桿所帶動之機構,下列敘述哪些正確? (A)螺桿之螺距愈小,則定位精度愈高 (B)螺桿之螺距愈大,則帶動馬達馬力需愈大 (C)與時規皮帶帶動之機構比較,有較高的移動速度 (D)螺桿之螺距愈大,則移動速度也愈快 。
複選題
176. 自動化機械在量產時,可以下列哪些模式運轉? (A)步進 (B)單一循環 (C)連續循環 (D)寸動操作 。
複選題
177. 自動化機械在調整機械位置或試車時,常以下列哪些模式運轉? (A)步進 (B)單一循環 (C)連續循環 (D)寸動操作 。
複選題
178. 有關機構之敘述,下列敘述哪些正確? (A)機構加裝減速齒輪組可提升其定位解析度 (B)在等速驅動下搖桿與滑塊機構具有慢去快回變換特性(C)以凸輪做為四分度分割機,其分配角為 270 度,停止角為 90 度 (D)日內瓦機構能將等速旋轉運動轉換為間歇性旋轉輸出之變換機構 。
複選題
179. 有關機構之敘述,下列敘述哪些正確? (A)機構加裝減速齒輪組可提升其輸出功率 (B)凸輪機構能將等速連續運動轉換成從動件的連續或不連續、等速或不等速的運動 (C)以凸輪做為四分度分割機,其分配角為 90度,停止角為 270 度 (D)日內瓦機構能將等速旋轉運動轉換為連續性旋轉輸出之變換機構 。
複選題
180. 下列哪些機構可做為連續輸入間歇分度輸出機構? (A)日內瓦機構 (B)齒條與小齒輪機構 (C)滾齒凸輪機構 (D)曲柄與直線滑台機構 。
複選題
181. 下列哪些機構不適合做為雙向控制用? (A)日內瓦機構 (B)蝸桿與蝸輪機構 (C)螺桿與直線滑台機構 (D)平行分度凸輪機構 。
複選題
182. 下列哪些機構屬於旋轉輸入旋轉輸出之轉換機構? (A)日內瓦機構 (B)活塞與曲柄機構 (C)行星齒輪機構 (D)蝸桿與蝸輪機構 。
複選題
183. 如圖有一組 60Hz 馬達驅動銑床銑削傳動機構,工作床往右邊移動,則
(A)平台速度 0.6 ㎜/sec (B)平台速度 0.8 ㎜/sec (C)馬達轉速 600rpm (D)馬達轉速 1200rpm 。
複選題
184. 如圖有一組 60Hz 馬達驅動銑床銑削傳動機構,工作床往左邊移動,則
(A)平台速度 0.8mm/sec (B)平台速度 1mm/sec (C)小齒輪轉速 40rpm (D)大齒輪轉速 10rpm 。
複選題
185. 如圖有一組 60Hz 轉差率 2.5%之馬達驅動銑床銑削傳動機構,則工作床台往右邊移動,則
(A)平台速度 0.925mm/sec (B)平台速度 0.975 mm/sec(C)馬達轉速 1200rpm (D)馬達轉速 1170rpm 。
複選題
186. 如圖有一組步進角 1.8 度之步進馬達驅動之銑床銑削傳動機構,當馬達接受 5 kH
Z
之全步進驅動訊號時,工作床台往右邊移動,則
(A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速12rpm 。
複選題
187. 如圖有一組步進角 1.8 度之步進馬達驅動之銑床銑削傳動機構,當馬達接受 5 kH
Z
之全步進驅動訊號時,工作床台往右邊移動,則
(A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速12rpm 。
複選題
188. 如圖有一組步進角 0.72 度之步進馬達驅動之銑床銑削傳動機構,當馬達接受 9 kH
Z
之全步進驅動訊號時,工作床台往右邊移動,則
(A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速 12rpm 。
複選題
189. 如圖有一組步進角 0.72 度之步進馬達驅動之銑床銑削傳動機構,當馬達接受 9 kH
Z
之全步進驅動訊號時,工作床台往右邊移動,則
(A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速 12rpm 。
申論題 (0)
相關試卷
114年 - 17000 機電整合 乙級 工作項目 08:維修 1-68(2025/12/26 更新)#135806
114年 · #135806
114年 - 17000 機電整合 乙級 工作項目 07:試車與調整 1-65(2025/12/26 更新)#135805
114年 · #135805
114年 - 17000 機電整合 乙級 工作項目 06:控制器的使用 51-118(2025/12/26 更新)#135804
114年 · #135804
114年 - 17000 機電整合 乙級 工作項目 06:控制器的使用 1-50(2025/12/26 更新)#135803
114年 · #135803
114年 - 17000 機電整合 乙級 工作項目 05:電動機選用 101-141(2025/12/26 更新)#135802
114年 · #135802
114年 - 17000 機電整合 乙級 工作項目 05:電動機選用 51-100(2025/12/26 更新)#135801
114年 · #135801
114年 - 17000 機電整合 乙級 工作項目 05:電動機選用 1-50(2025/12/26 更新)#135800
114年 · #135800
114年 - 17000 機電整合 乙級 工作項目 04:電控、感測、轉換元件認識 51-98(2025/12/26 更新)#135799
114年 · #135799
114年 - 17000 機電整合 乙級 工作項目 04:電控、感測、轉換元件認識 1-50(2025/12/26 更新)#135798
114年 · #135798
114年 - 17000 機電整合 乙級 工作項目 03:氣壓、油壓系統、迴路設計 151-177(2025/12/26 更新)#135797
114年 · #135797
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)減速比 i = 6:1 (B)螺桿之導程 L=6 mm (C)減速比 i = 5:1 (D)螺桿之導程 L=8 mm 。
(A)減速比 i = 6:1 (B)螺桿之導程 L=6 mm (C)減速比 i = 5:1 (D)螺桿之導程 L=8 mm 。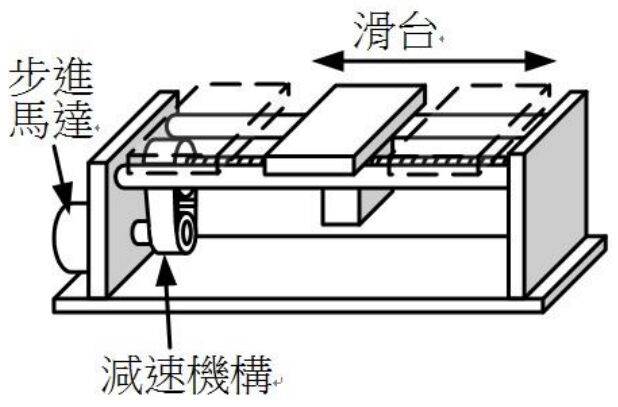 (A)減速比 i = 12.5:1 (B)螺桿之導程 L=6 mm (C)減速比 i = 15:1 (D)螺桿之導程 L=8 mm 。
(A)減速比 i = 12.5:1 (B)螺桿之導程 L=6 mm (C)減速比 i = 15:1 (D)螺桿之導程 L=8 mm 。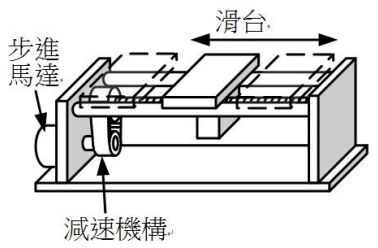 (A)滑台之速度V=6 mm/sec (B)滑台之速度 V=10 mm/sec (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。
(A)滑台之速度V=6 mm/sec (B)滑台之速度 V=10 mm/sec (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。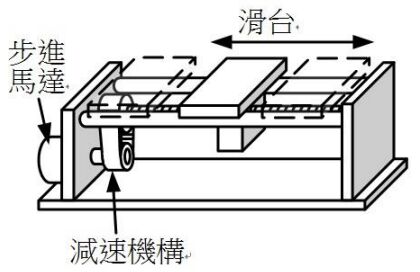 (A)滑台之速度 V=6mm/sec (B)滑台之速度 V=10 mm/sec (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。
(A)滑台之速度 V=6mm/sec (B)滑台之速度 V=10 mm/sec (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。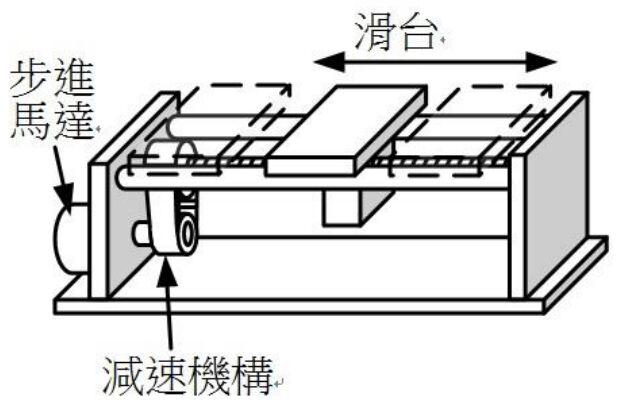 (A)滑台之速度 V=4 mm/sec (B)滑台之速度 V=6 mm/sec (C)螺桿之導程L=5 mm (D)螺桿之導程 L=10 mm 。
(A)滑台之速度 V=4 mm/sec (B)滑台之速度 V=6 mm/sec (C)螺桿之導程L=5 mm (D)螺桿之導程 L=10 mm 。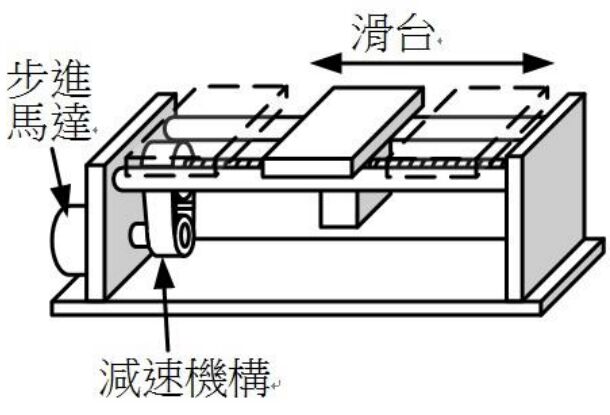 (A)步進角度θ= 0.72° (B)滑台之速度 V=27 cm/min (C)滑台之速度 V=24 cm/min (D)步進角度θ=0.36° 。
(A)步進角度θ= 0.72° (B)滑台之速度 V=27 cm/min (C)滑台之速度 V=24 cm/min (D)步進角度θ=0.36° 。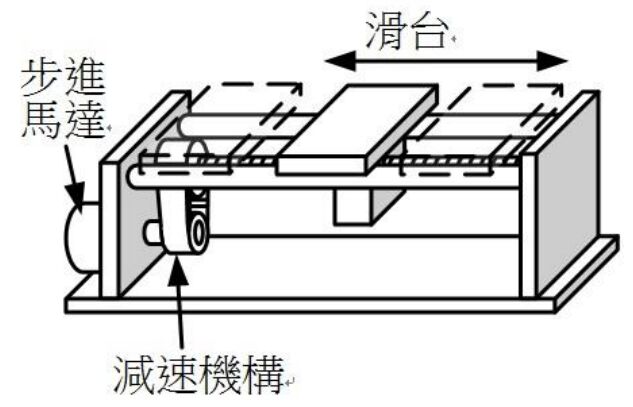 (A)步進角度θ= 0.72° (B)滑台之速度 V=27 cm/min (C)滑台之速度 V=24 cm/min (D)步進角度θ=0.36° 。
(A)步進角度θ= 0.72° (B)滑台之速度 V=27 cm/min (C)滑台之速度 V=24 cm/min (D)步進角度θ=0.36° 。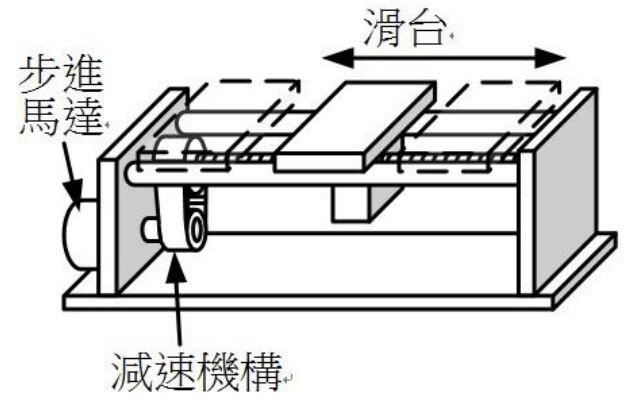 (A)滑台之移動距離S=50 mm (B)滑台之移動距離 S=60 mm (C)螺桿之導程 L=10 mm (D)螺桿之導程 L=5 mm 。
(A)滑台之移動距離S=50 mm (B)滑台之移動距離 S=60 mm (C)螺桿之導程 L=10 mm (D)螺桿之導程 L=5 mm 。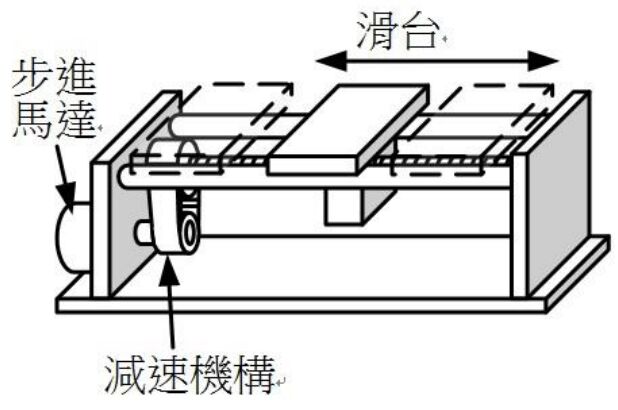 (A)滑台之移動距離 S=50 mm (B)滑台之移動距離 S=60 mm (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。
(A)滑台之移動距離 S=50 mm (B)滑台之移動距離 S=60 mm (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=10 mm 。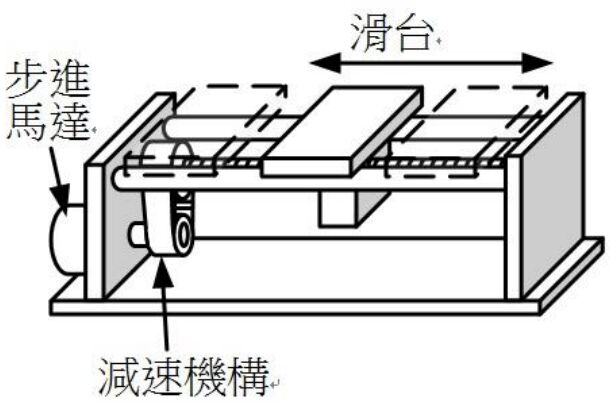 (A)滑台之移動距離 S=24 mm (B)滑台之移動距離 S=30 mm (C)螺桿之導程L=5 mm (D)螺桿之導程 L=10 mm 。
(A)滑台之移動距離 S=24 mm (B)滑台之移動距離 S=30 mm (C)螺桿之導程L=5 mm (D)螺桿之導程 L=10 mm 。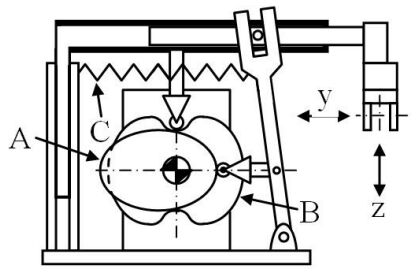 (A)彈簧 C 係使從動件確保接觸凸輪 A (B)彈簧 C 係使從動件確保接觸凸輪 B (C)水平方向 y 是以凸輪 A 驅動 (D)水平方向 y 是以凸輪 B 驅動 。
(A)彈簧 C 係使從動件確保接觸凸輪 A (B)彈簧 C 係使從動件確保接觸凸輪 B (C)水平方向 y 是以凸輪 A 驅動 (D)水平方向 y 是以凸輪 B 驅動 。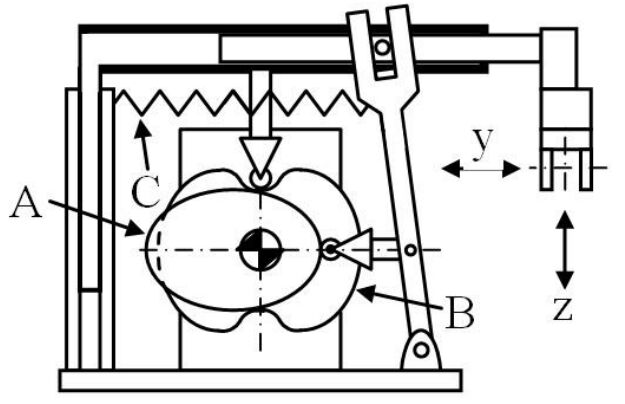 (A)夾爪的運動路徑為ㄇ字型 (B)夾爪的運動路徑為 L 字型 (C)垂直方向 z 是以凸輪 A 驅動 (D)垂直方向 z 是以凸輪 B 驅動 。
(A)夾爪的運動路徑為ㄇ字型 (B)夾爪的運動路徑為 L 字型 (C)垂直方向 z 是以凸輪 A 驅動 (D)垂直方向 z 是以凸輪 B 驅動 。 ,如導螺桿每轉動 10 圈,滑台移動 50mm,若欲每輸出 1 pulse 滑台要有 1μm 移動量,下列敘述哪些正確?
,如導螺桿每轉動 10 圈,滑台移動 50mm,若欲每輸出 1 pulse 滑台要有 1μm 移動量,下列敘述哪些正確?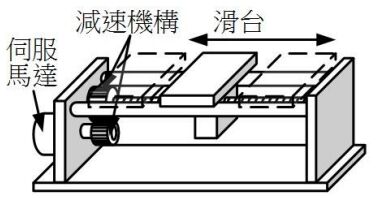 (A)
(A)  (B)
(B)  (C)螺桿之導程 L=5 mm (D)螺桿之導程L=8 mm 。
(C)螺桿之導程 L=5 mm (D)螺桿之導程L=8 mm 。 ,如導螺桿每轉動 10 圈,滑台移動 80mm,若欲每輸出 1 pulse 滑台要有 2μm 移動量,下列敘述哪些正確?
,如導螺桿每轉動 10 圈,滑台移動 80mm,若欲每輸出 1 pulse 滑台要有 2μm 移動量,下列敘述哪些正確?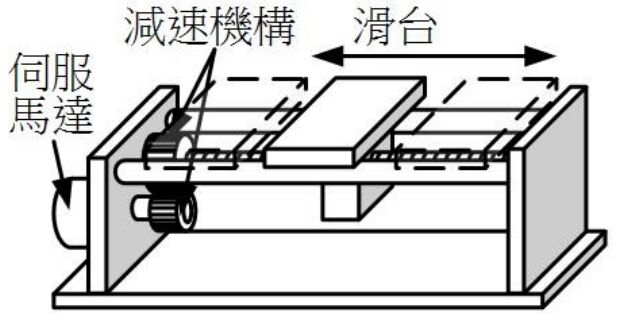 (A)
(A) (B)
(B) (C)螺桿之導程 L=5 mm (D)螺桿之導程 L=8 mm 。
(C)螺桿之導程 L=5 mm (D)螺桿之導程 L=8 mm 。 ,如欲每輸出 1 pulse 滑台要有 1.25μm 移動量,若控制脈波頻率 f=80k pps(Hz),下列敘述哪些正確?
,如欲每輸出 1 pulse 滑台要有 1.25μm 移動量,若控制脈波頻率 f=80k pps(Hz),下列敘述哪些正確?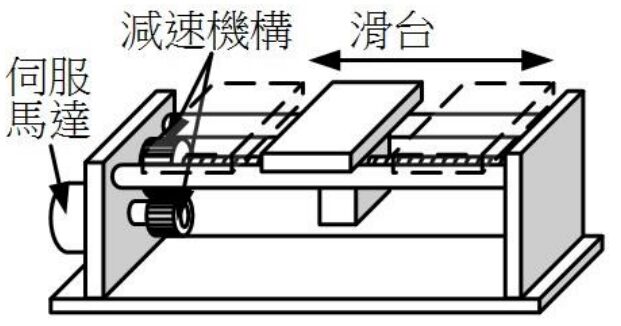 (A)
(A) (B)
(B)  (C)滑台移動速度V=20 cm/sec (D)滑台移動速度 V=10 cm/sec 。
(C)滑台移動速度V=20 cm/sec (D)滑台移動速度 V=10 cm/sec 。 ,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若控制脈波頻率 f=100kpps(Hz),下列敘述哪些正確?
,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若控制脈波頻率 f=100kpps(Hz),下列敘述哪些正確?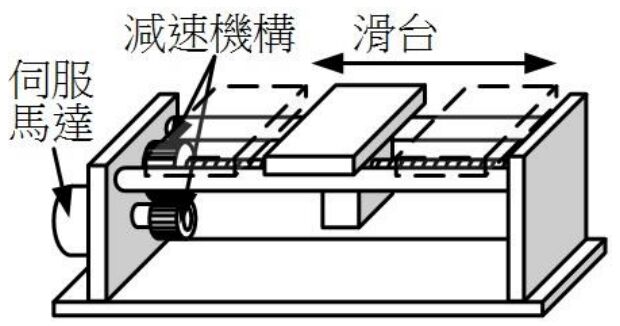 (A)
(A) (B)
(B) (C)滑台移動速度 V=20 cm/sec (D)滑台移動速度 V=10 cm/sec 。
(C)滑台移動速度 V=20 cm/sec (D)滑台移動速度 V=10 cm/sec 。 ,若控制脈波頻率 f=150k pps(Hz),下列敘述哪些正確?
,若控制脈波頻率 f=150k pps(Hz),下列敘述哪些正確?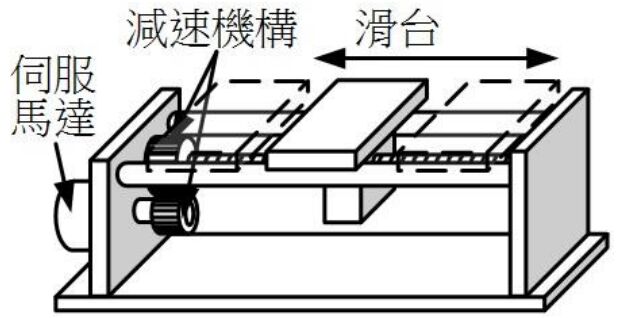 (A)滑台解析度R=2.0μm (B)滑台移動速度 V=30 cm/sec (C)滑台解析度 R=1.25μm (D)滑台移動速度 V=18.75 cm/sec 。
(A)滑台解析度R=2.0μm (B)滑台移動速度 V=30 cm/sec (C)滑台解析度 R=1.25μm (D)滑台移動速度 V=18.75 cm/sec 。 ,若控制脈波頻率 f=150k pps(Hz) ,下列敘述哪些正確?
,若控制脈波頻率 f=150k pps(Hz) ,下列敘述哪些正確?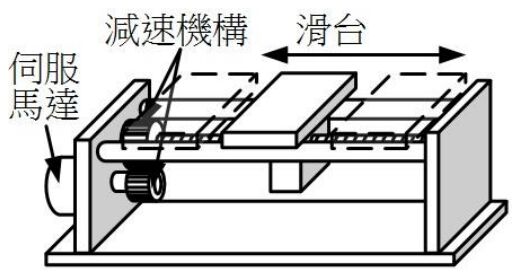 (A)滑台解析度R=2.0μm (B)滑台移動速度 V=30 cm/sec (C)滑台解析度 R=1.25μm (D)滑台移動速度 V=18.75 cm/sec 。
(A)滑台解析度R=2.0μm (B)滑台移動速度 V=30 cm/sec (C)滑台解析度 R=1.25μm (D)滑台移動速度 V=18.75 cm/sec 。 ,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若控制脈波頻率 f,滑台的移動速度 V =30 cm/sec,下列敘述哪些正確?
,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若控制脈波頻率 f,滑台的移動速度 V =30 cm/sec,下列敘述哪些正確?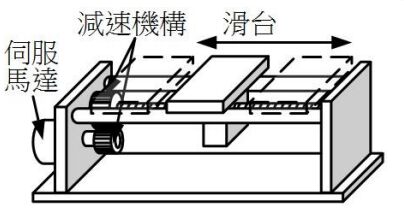 (A)f=150k pps(Hz) (B)f=200kpps(Hz) (C)
(A)f=150k pps(Hz) (B)f=200kpps(Hz) (C)  (D)
(D)  。
。 (A)f=150k pps(Hz) (B)f=200kpps(Hz) (C)
(A)f=150k pps(Hz) (B)f=200kpps(Hz) (C)  (D)
(D)  。
。 ,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若脈波輸出數 N=100k pulses,下列敘述哪些正確?
,如欲每輸出 1 pulse 滑台要有 2.0μm 移動量,若脈波輸出數 N=100k pulses,下列敘述哪些正確?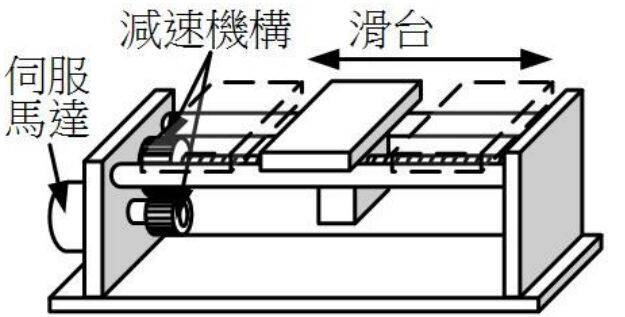 (A)
(A) (B)
(B) (C)移動距離 S=20cm (D)移動距離 S=15 cm 。
(C)移動距離 S=20cm (D)移動距離 S=15 cm 。 ,如欲每輸出 1 pulse 滑台要有 1.0μm 移動量,若脈波輸出數 N=150k pulses,下列敘述哪些正確?
,如欲每輸出 1 pulse 滑台要有 1.0μm 移動量,若脈波輸出數 N=150k pulses,下列敘述哪些正確?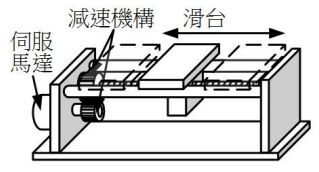 (A)
(A) (B)
(B) (C)移動距離 S=20 cm (D)移動距離 S=15 cm 。
(C)移動距離 S=20 cm (D)移動距離 S=15 cm 。 ,若滑台的移動距離 S =30 cm,下列敘述哪些正確?
,若滑台的移動距離 S =30 cm,下列敘述哪些正確? (A)滑台解析度 R=1.5μm (B)所需脈波數 N=200k pulses (C)滑台解析度 R=1.25μm (D)所需脈波數 N=160k pulses 。
(A)滑台解析度 R=1.5μm (B)所需脈波數 N=200k pulses (C)滑台解析度 R=1.25μm (D)所需脈波數 N=160k pulses 。 ,若滑台的移動距離 S =20 cm,下列敘述哪些正確?
,若滑台的移動距離 S =20 cm,下列敘述哪些正確? (A)滑台解析度R=1.5μm (B)所需脈波數 N=200k pulses (C)滑台解析度 R=1.25μm (D)所需脈波數 N=160k pulses 。
(A)滑台解析度R=1.5μm (B)所需脈波數 N=200k pulses (C)滑台解析度 R=1.25μm (D)所需脈波數 N=160k pulses 。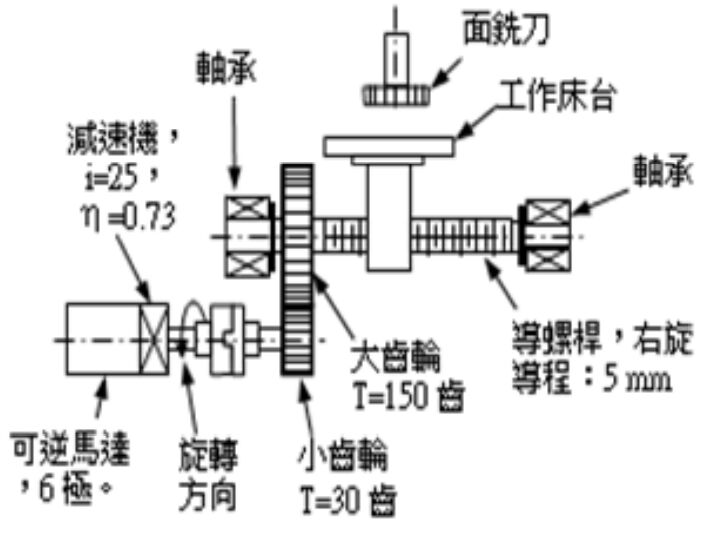 (A)平台速度 0.6 ㎜/sec (B)平台速度 0.8 ㎜/sec (C)馬達轉速 600rpm (D)馬達轉速 1200rpm 。
(A)平台速度 0.6 ㎜/sec (B)平台速度 0.8 ㎜/sec (C)馬達轉速 600rpm (D)馬達轉速 1200rpm 。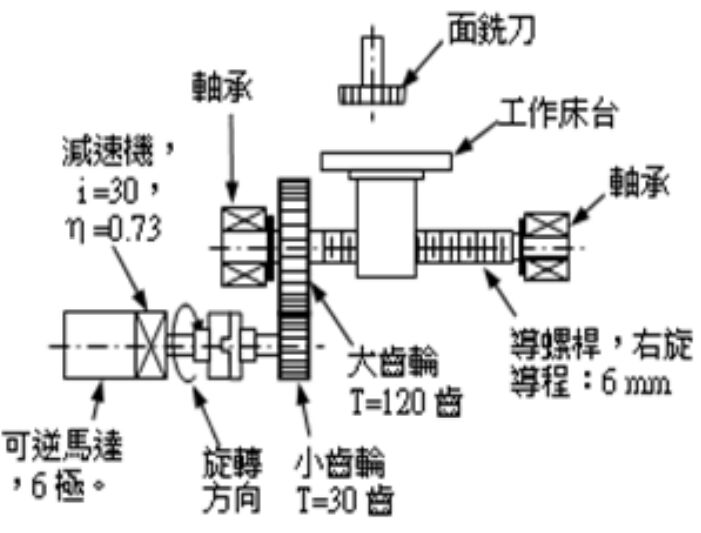 (A)平台速度 0.8mm/sec (B)平台速度 1mm/sec (C)小齒輪轉速 40rpm (D)大齒輪轉速 10rpm 。
(A)平台速度 0.8mm/sec (B)平台速度 1mm/sec (C)小齒輪轉速 40rpm (D)大齒輪轉速 10rpm 。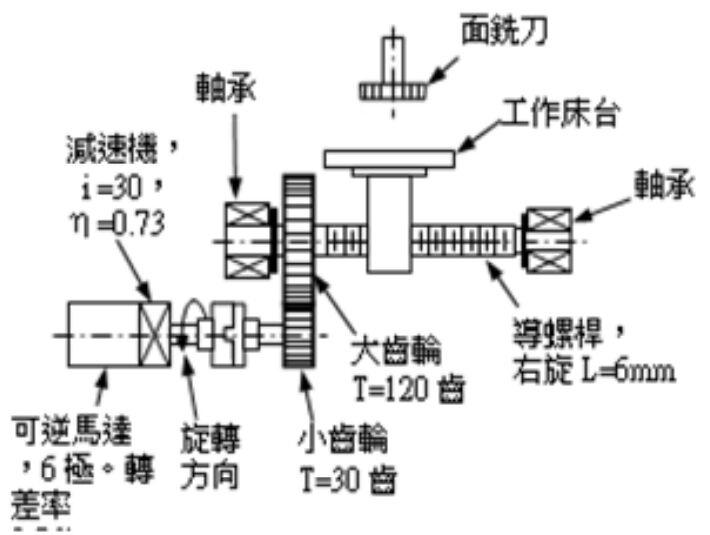 (A)平台速度 0.925mm/sec (B)平台速度 0.975 mm/sec(C)馬達轉速 1200rpm (D)馬達轉速 1170rpm 。
(A)平台速度 0.925mm/sec (B)平台速度 0.975 mm/sec(C)馬達轉速 1200rpm (D)馬達轉速 1170rpm 。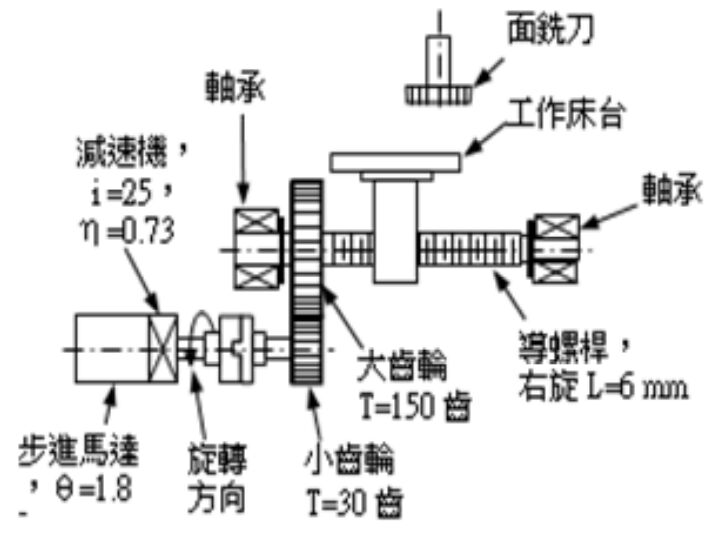 (A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速12rpm 。
(A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速12rpm 。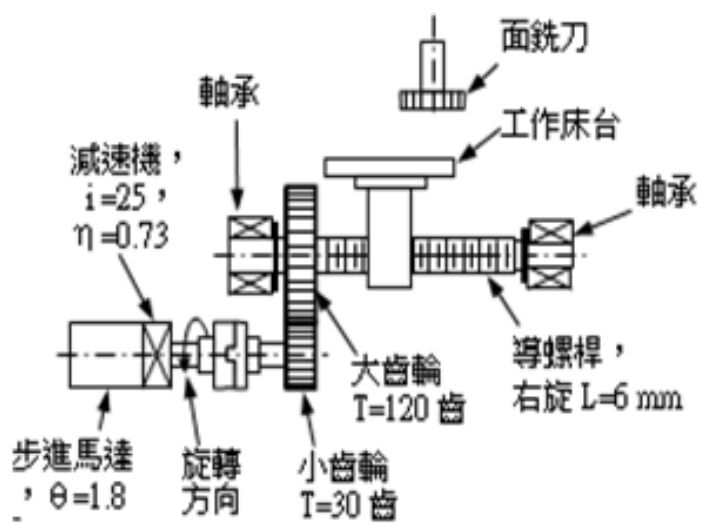 (A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速12rpm 。
(A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速12rpm 。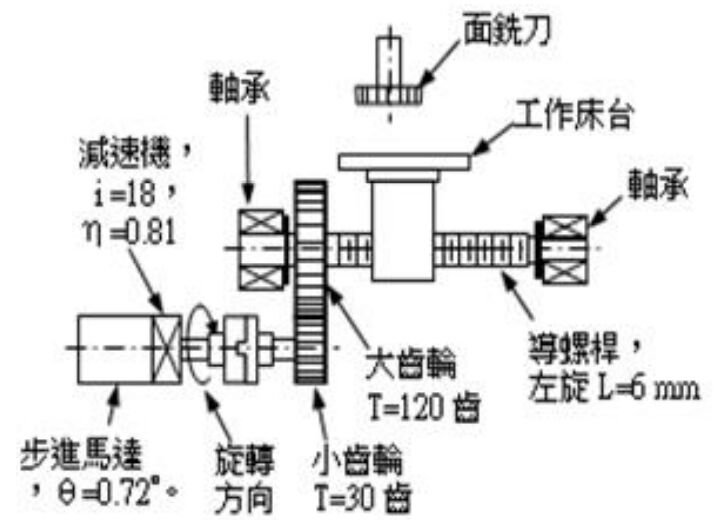 (A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速 12rpm 。
(A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速 12rpm 。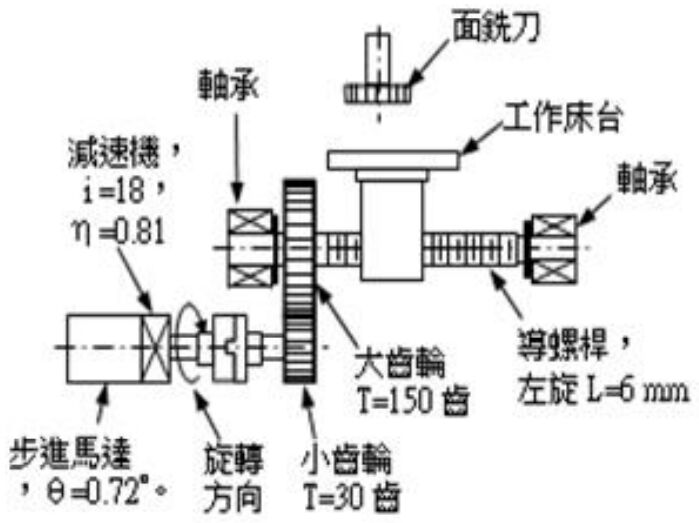 (A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速 12rpm 。
(A)平台速度 1.2 ㎜/sec (B)平台速度 1.5 ㎜/sec (C)小齒輪轉速 60rpm (D)大齒輪轉速 12rpm 。