阿摩線上測驗
登入
首頁
>
技檢◆機電整合-乙級
> 114年 - 17000 機電整合 乙級 工作項目 01:自動化機械元件的應用及設計 51-100(2025/12/26 更新)#135790
114年 - 17000 機電整合 乙級 工作項目 01:自動化機械元件的應用及設計 51-100(2025/12/26 更新)#135790
科目:
技檢◆機電整合-乙級 |
年份:
114年 |
選擇題數:
50 |
申論題數:
0
試卷資訊
所屬科目:
技檢◆機電整合-乙級
選擇題 (50)
51. 下列何者傳動摩擦力最小? (A)滑動套筒式 (B)輥珠套筒式 (C)V 型槽滑軌(D)T 型槽滑軌 。
52. 兩軸互相平行但不在同一中心線上,且其偏心極微。當兩軸的轉速需要絕對相等時,最適合使用之聯結器為 (A)流體聯結器 (B)套筒聯結器 (C)歐丹聯結器 (D)凸緣聯結器 。
53. 兩軸中心線不在同一直線上,或允許兩軸有少量的平行失準、角度失準及端隙(軸向移動),可防止扭歪與震動產生,最適合使用之聯絡器為(A)剛性聯結器 (B)硬性聯結器 (C)撓性聯結器 (D)流體聯結器 。
54. 歐丹聯結器是一種 (A)剛性聯結器 (B)硬性聯結器 (C)撓性聯結器 (D)流體聯結器 。
55. 利用聯軸器傳動,兩軸心允許之偏心量為 (A)大 (B)稍有偏心 (C)要完全對心 (D)非常大 。
56. 下列傳動組合,何者傳動背隙較小? (A)小齒輪與齒條 (B)方形螺桿與套筒 (C)滾珠螺桿與套筒 (D)鏈條與鏈輪 。
57. 下列傳動組件何者傳動精度較高? (A)平皮帶 (B)V 型皮帶 (C)齒形皮帶(D)鏈條 。
58. 肘節機構的功能一般應用於 (A)夾具 (B)調速器 (C)分度 (D)旋轉機構 。
59. 定位銷之設置宜 (A)於中心點一支 (B)中心線上二支 (C)最大距離二支 (D)最短距離二支 。
60. 於振動場合之二機件結合宜選用 (A)固定螺釘 (B)斜銷 (C)彈簧銷 (D)半圓鍵 。
61. 從斜坡道連續緊密送料至水平輸送帶,為避免工件瞬間大量落入,可裝置何種機構來處理? (A)換向 (B)分離 (C)倉儲 (D)平移 機構。
62. 當馬達連接聯軸器驅動導螺桿及平台負荷時,其安裝之偏心度應較聯軸器允許範圍 (A)較大 (B)較小 (C)剛好在最大範圍 (D)無關 。
63. 下列何種齒輪組可提供較大的減速比? (A)內齒輪 (B)螺旋齒輪 (C)斜齒輪(D)蝸桿與蝸輪 。
64. 下列傳動機件在運動時何者噪音最小? (A)鏈條 (B)齒輪 (C)齒規皮帶 (D)連桿機構 。
65. 散裝機械小零件要進料及姿勢整列,宜採用 (A)倉匣 (B)輸送帶 (C)斜坡滑道 (D)震動送料器 。
66. 不需加裝動力即可進料,宜採用 (A)倉匣 (B)輸送帶 (C)斜坡滑道 (D)震動送料器 。
67. 同一種長條片狀板料進料,宜採用 (A)倉匣 (B)輸送帶 (C)斜坡滑道 (D)震動送料器 。
68. 從斜坡滑道緊密送料,為避免連續大量出料,滑道末端應裝設何種機構? (A)換向 (B)分離 (C)平移 (D)分度 。
69. 機械手臂動力軸有直線型(P)及角度型(R),XYZ 軸直角座標____________ 型機構。(A)PPP (B)PPR (C)PRR (D)RRR
70. 機械手臂動力軸有直線型(P)及角度型(R),多關節座標型機械手臂是_______ 型機構。(A)PPP (B)PPR (C)PRR (D)RRR
71. 機械手臂動力軸有直線型(P)及角度型(R),極座標型機械手臂是_______ 型機構。(A)PPP(B)PPR (C)PRR (D)RRR
72. SCARA 機械手臂的座標型式為 (A)直角座標 (B)關節座標 (C)極座標 (D)水平圓筒座標 。
73. 機械手臂動力軸有直線型(P)及角度型(R),平面圓筒座標型(SCARA)機械手臂是_______ 型機構。(A)PPP (B)PPR (C)PRR (D)RRR
74. 裝配用機械手臂之手腕部至少應具有幾個自由度? (A)3 (B)4 (C)5 (D)6 。
75. 5 軸關節型機械手臂,包括底部左右、肩部上下、肘部上下、腕部上下及 (A)夾爪張合 (B)腕部旋轉 (C)肘部旋轉 (D)腕部伸縮 。
76. 裝配用機械手臂用於零件裝合,若插件有位置偏差問題導致插件困難,應如何解決? (A)腕部加裝遠心順應器 (B)改用低阻尼系統 (C)各關節加裝力量感測器 (D)調整 PID 控制器 。
77. 史都華(Stewart)平台擁有幾個自由度(DOF)? (A)3 (B)4 (C)5 (D)6 。
78. 下列何者不是滾珠螺桿設計選用基本條件? (A)定位精度 (B)馬達最高轉速 (C)摩擦係數 (D)最大行程 。
79. 下列何者不是滾珠螺桿設計選用基本條件? (A)負荷條件 (B)馬達最低轉速 (C)平均軸向力 (D)螺桿導程 。
80. 自由流型自動裝配連續生產線,由於裝配作業時間不穩定,必須要設置(A)緩衝站 (B)倉儲站 (C)分流站 (D)出料站 。
81. 自由流型自動裝配連續生產線,只要完成本工作站的工作,便可隨時將工件移至自動裝配生產線下一站的是 (A)連續性傳送 (B)間歇傳送 (C)同步傳送 (D)非同步傳送 。
82. 為使自動站與手工站混合生產,生產線物流方式,宜採用 (A)連續性傳送 (B)間歇傳送 (C)同步傳送 (D)非同步傳送 。
83. 生產線物流方式,加工週期時間最快的是 (A)連續性傳送 (B)間歇傳送 (C)同步傳送 (D)非同步傳送 。
84. 迴轉分度盤送料屬於 (A)連續性傳送 (B)非連續性傳送 (C)同步傳送 (D)非同步傳送 。
85. 利用托板在輸送帶上送料大都屬於 (A)連續性傳送 (B)間歇傳送 (C)同步傳送 (D)非同步傳送 。
86. 圓形震動送料機主要是分出 (A)不同種類零件之相同姿勢整列 (B)同種類零件之一種姿勢整列 (C)同種類零件之二種姿勢整列 (D)不同種類零件之二種姿勢整列 。
87. 以凸輪做為四分度分割機, (A)分配角為 60 度 (B)分配角為 90 度 (C)停止角為 60 度 (D)停止角為 90 度 。
88. 下列何者不是使用軸承的功能? (A)減少軸的傳動摩擦阻力 (B)提高機構剛性 (C)固定旋轉軸之中心 (D)導正旋轉軸之中心 。
89. 下列何者無法做為旋轉分度機構? (A)圓筒凸輪 (B)日內瓦輪 (C)蝸桿蝸輪(D)行走樑 。
90. 定位器、緩衝器上的螺紋是用來做位置微調用,通常使用兩個螺帽,一個是定位用、另一個在 (A)防止鬆動用 (B)減少阻力用 (C)避免震動用 (D)調整距離用 。
91. 如下圖為一機構可作上下與旋轉運動,1 為旋臂,2 為夾爪,3 為升降/旋轉單元,5 為馬達與齒輪組,則 4 可能為
(A)四連桿控制單元 (B)凸輪控制單元 (C)曲柄與搖桿 (D)曲柄與滑台 。
92. 如下圖為一機構可作上下與旋轉運動。1 為旋臂,2 為夾爪,3 為升降/旋轉單元,5 為馬達與齒輪組,此機構為
(A)取放單元(P&P) (B)SCARA機械臂 (C)史都華(Stewart)平台 (D)惠氏機構(Whitworth) 。
93. 如下圖為一機構,以夾爪的爪指為中心點來看,可得到 y 與 z 方向的運動,由圖示可能是馬達帶動何種機構達成?
(A)四連桿控制單元 (B)凸輪控制單元 (C)曲柄與搖桿 (D)曲柄與滑台 。
94. 如圖為一機構,以夾爪的爪指為中心點來看,可得到 y 與 z 方向的運動,由圖示凸輪控制單元有幾個凸輪?
(A)1 (B)2 (C)3 (D)4 。
95. 如圖為一機構,以夾爪的爪指為中心點來看,可得到 y 與 z 方向的運動,由圖示彈簧的作用是
(A)協助旋臂移動 (B)支撐夾爪升降 (C)確保凸輪接觸 (D)避免旋臂移動震動 。
96. 如圖為圓柱型凸輪。從動板 3 可依溝槽輪廓依字母序 A 至 J 而左右移動,其可移動的最大行程為
(A)A 至 F (B)B 至 G (C)C 至 H (D)D 至 I 的軸向距離。
97. 如下圖為圓柱型凸輪。當溝槽輪廓從 A,B 至 C 時,從動板 3 的行程為
(A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。
98. 如下圖為圓柱型凸輪。當溝槽輪廓從 C、D、E 至 F 時,從動板 3 的行程為
(A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。
99. 如圖為圓柱型凸輪。當溝槽輪廓從 G、H、J 至 A 時,從動板 3 的行程為
(A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。
100. 下圖為圓柱型凸輪,當溝槽輪廓從 C、D、E 至 J、A 時,從動板 3 的行程為?
(A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。
申論題 (0)
相關試卷
114年 - 17000 機電整合 乙級 工作項目 08:維修 1-68(2025/12/26 更新)#135806
114年 · #135806
114年 - 17000 機電整合 乙級 工作項目 07:試車與調整 1-65(2025/12/26 更新)#135805
114年 · #135805
114年 - 17000 機電整合 乙級 工作項目 06:控制器的使用 51-118(2025/12/26 更新)#135804
114年 · #135804
114年 - 17000 機電整合 乙級 工作項目 06:控制器的使用 1-50(2025/12/26 更新)#135803
114年 · #135803
114年 - 17000 機電整合 乙級 工作項目 05:電動機選用 101-141(2025/12/26 更新)#135802
114年 · #135802
114年 - 17000 機電整合 乙級 工作項目 05:電動機選用 51-100(2025/12/26 更新)#135801
114年 · #135801
114年 - 17000 機電整合 乙級 工作項目 05:電動機選用 1-50(2025/12/26 更新)#135800
114年 · #135800
114年 - 17000 機電整合 乙級 工作項目 04:電控、感測、轉換元件認識 51-98(2025/12/26 更新)#135799
114年 · #135799
114年 - 17000 機電整合 乙級 工作項目 04:電控、感測、轉換元件認識 1-50(2025/12/26 更新)#135798
114年 · #135798
114年 - 17000 機電整合 乙級 工作項目 03:氣壓、油壓系統、迴路設計 151-177(2025/12/26 更新)#135797
114年 · #135797
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)四連桿控制單元 (B)凸輪控制單元 (C)曲柄與搖桿 (D)曲柄與滑台 。
(A)四連桿控制單元 (B)凸輪控制單元 (C)曲柄與搖桿 (D)曲柄與滑台 。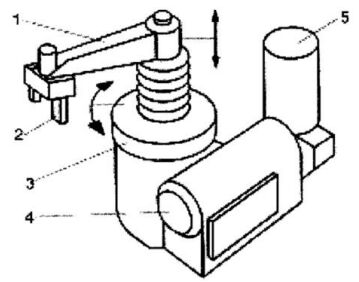 (A)取放單元(P&P) (B)SCARA機械臂 (C)史都華(Stewart)平台 (D)惠氏機構(Whitworth) 。
(A)取放單元(P&P) (B)SCARA機械臂 (C)史都華(Stewart)平台 (D)惠氏機構(Whitworth) 。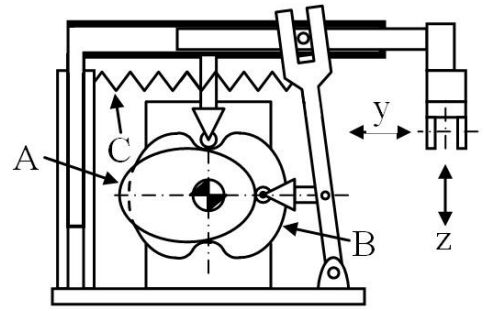 (A)四連桿控制單元 (B)凸輪控制單元 (C)曲柄與搖桿 (D)曲柄與滑台 。
(A)四連桿控制單元 (B)凸輪控制單元 (C)曲柄與搖桿 (D)曲柄與滑台 。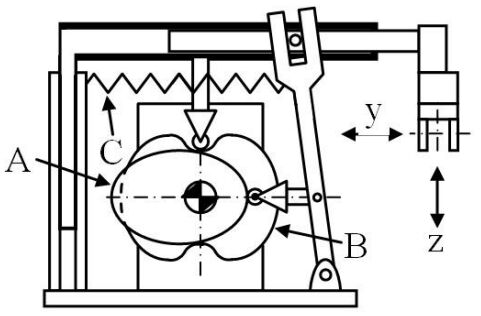 (A)1 (B)2 (C)3 (D)4 。
(A)1 (B)2 (C)3 (D)4 。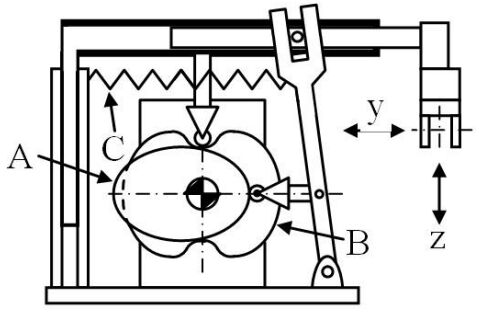 (A)協助旋臂移動 (B)支撐夾爪升降 (C)確保凸輪接觸 (D)避免旋臂移動震動 。
(A)協助旋臂移動 (B)支撐夾爪升降 (C)確保凸輪接觸 (D)避免旋臂移動震動 。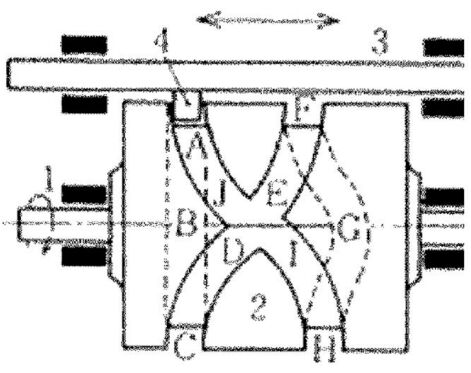 (A)A 至 F (B)B 至 G (C)C 至 H (D)D 至 I 的軸向距離。
(A)A 至 F (B)B 至 G (C)C 至 H (D)D 至 I 的軸向距離。 (A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。
(A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。 (A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。
(A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。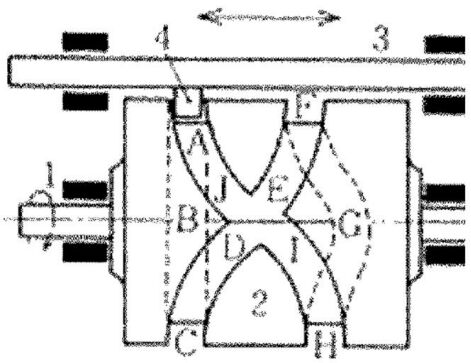 (A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。
(A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。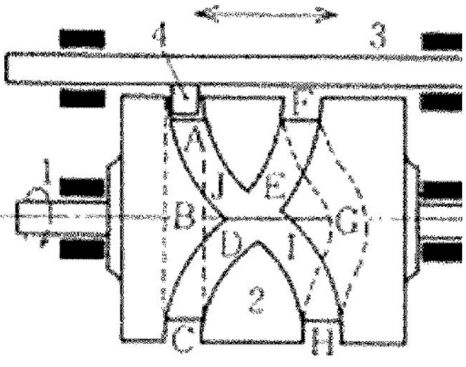 (A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。
(A)靜止不動 (B)向右移動 (C)向左移動 (D)左右往復移動 。